通常使用三个工具来测量振动噪声(噪声) - 存储示波器(范围);振动传感器(传感器),通常是“地震级”加速度计1;以及具有Sub-Hertz功能(分析仪)的两通道频谱分析仪。
范围用于观察传感器在时域中的信号,分析仪可以对传感器信号进行傅立叶分析,以提供相同数据的频域图片。
尽管这看起来很简单,但范围只能指示噪声的峰值水平,但不能提供根平方(RMS)值或“噪音的频率。”“峰值”值是什么意思?问噪声的“频率”是什么?RMS值是什么意思?通常,询问“噪声频率”是什么是不正确的。同样,除非指定计算其计算的频率范围,否则RMS值也没有任何含义。
同样,分析仪计算振幅光谱或振幅光谱密度。一个以伏特表示,另一个在v/√中表示赫兹(“每根赫兹的伏特”)。应该使用哪个?大多数分析仪默认为振幅频谱,这不是表征大多数噪声源的正确方法。结果,由于分析仪设置是错误的,有几个用户收集毫无意义的数据。
为了正确使用这些工具,必须更好地了解可测量参数:噪声。噪声的特征是随机或连贯的2。这些可以进一步分为固定或非平稳。这些是不同的噪声源,需要使用不同的技术进行分析。进行测量或调查的个人必须找到噪声的类型并适当地测量其。
噪声类型:随机与连贯:
在图1中显示了示波器中不同类型的噪声的外观。选择了示例以轻松识别不同类型的噪声。
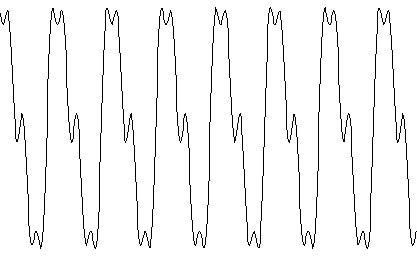
A:纯粹的周期性(连贯)噪声
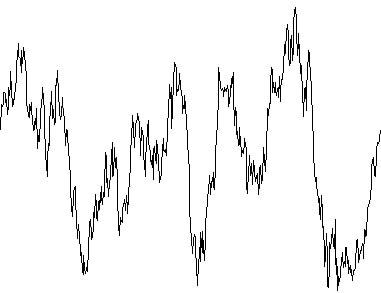
B:纯粹的随机噪声
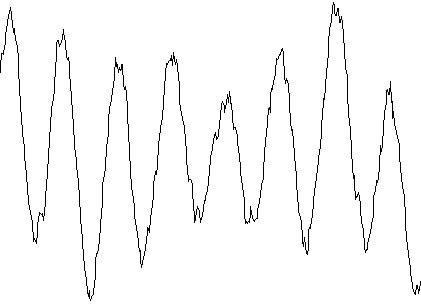
C:周期性和随机噪声在一起
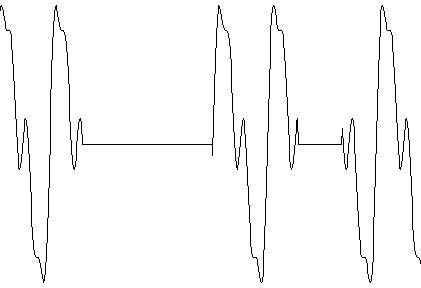
D:非平稳的周期性噪声
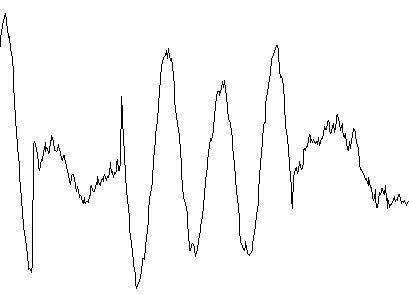
E:随机加非平稳的周期性噪声
F:非平稳随机噪声。
图1
曲线1a和1b显示了许多人会识别出的噪音。但是它们是在现实世界中最不可能观察到的。曲线1C说明了最常见的噪声类型:A和B的组合。
在这里,为了易于说明,相干噪声源(周期性噪声)显示在随机噪声上占主导地位。但是,随机噪声也可以主导。通常,分析仪必须“看到”信号中的相干噪声,因为通常从示波器轨迹中明显噪声分量。
实际上,噪声几乎永远不会具有恒定的幅度,但是随着时间而变化,这种噪声被称为非平稳。曲线1D显示随机关闭并打开时的周期性噪声源。曲线1E显示了带有空气压缩机或HVAC系统循环的建筑物中产生的噪声。
在这里,存在随机噪声的背景,并具有周期性的组件。除了“在”和“ OFF”上的意义之外,非平稳噪声还可能意味着噪声逐渐构建或减少。曲线1F说明了非平稳的随机噪声。当麦克风靠在高速公路附近或暴风雨来来时,在地震噪声数据附近或地震噪声数据中,这种噪音很常见3。
测量噪声
示波器可以快速指示测量过程中主导噪声的类型,并可以确定峰值噪声水平(与分析仪不同)。但是,这些并不广泛使用,频谱分析仪是量化噪声的最重要工具。这里的事情可能会遇到问题。
要理解和测量的最简单噪声源是固定的相干噪声源。如曲线1a所示,信号还由纯正弦波组成,除了一些较高的谐波(2ƒ0,3ƒ0,4ƒ0等等)。每个信号组件都有明确的振幅和频率。
Spectrum Analyzer对该信号进行数字数字化,在数字化数据上执行快速的傅立叶变换(FFT),并提供了一个振幅频谱,该光谱显示了组件(以微米或伏特)与频率的幅度的关系。
除绘图外,还可以将每个峰的频率和高度列表。该方法适合测量连贯的噪声源的强度,即使存在随机噪声。
随机噪声需要另一种方法,因为它在根本上是不同的。对于随机噪声,不再存在特定频率的信号的特定级别或振幅。实际上,在任何给定频率上都不存在噪声。相反,必须考虑随机噪声。
在房间中的空气量中,存在许多空气分子,但单个点不存在空气分子。为了定义空气分子的数量,有必要了解空气密度和有限的空气体积。没有音量意味着空气不存在。讨论给定点的平均空气密度是完全合法的,并且在各个点的空气密度有所不同(空气在个人的脚上与头部的空气密集)。这也适用于随机噪声。
对于随机噪声,等效密度称为特定频率的振幅光谱密度(ASD),等效体积称为频率带宽。空气分子的数量类似于信号的RMS水平。在本文的背景下,这是RMS地面运动。RMS振幅表示为:
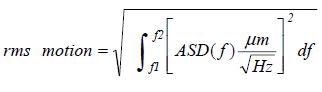
在这里,ASD(ƒ)是频率的函数,具有单位4微米/√赫兹。积分的形式表明了为什么ASD表示“ per-hertz”:这取消了dƒ的单位,并提供了RMS的单位,导致适当的单位(microns)。如果1/√1/√,则分析仪可以显示ASD(ƒ)赫兹或选择“ root-hz”单元。
正如仅针对固定体积定义的空气分子数一样,同样,RMS运动仅针对固定频率的频率定义,在这种情况下,从ƒ中定义了RMS运动1到ƒ2。1/3八度图通常用于表达RMS运动。在这里,频谱分为1/3八度5垃圾箱(从1到1.23 Hz,1.23至1.59 Hz,1.59至2.0 Hz等)。
积分是在每个频率范围内执行的,之后将所得的RMS值(以微米为单位)相对于频率绘制。在几个分析仪中,此任务是作为内置功能完成的。为了计算频率范围更大的RMS运动,正交总和6在该范围内的所有垃圾箱中都采用。
在光谱分析仪中,[伏特或单位]/√的幅度光谱密度单元赫兹必须选择垂直尺度4,失败的随机噪声无法正确测量。同样,如果将分析仪配置为测量光谱密度,则无法测量相干噪声源(以1/3八度或ASD格式)的正确值。必须在测量密度还是振幅之前告诉分析仪。
分析仪的作用
图2显示了相干和随机噪声源的行为不同。
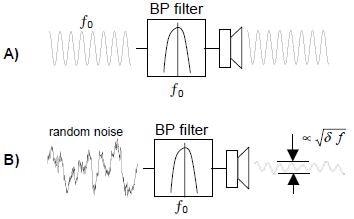
图2
一个以ƒ中心的简单带通滤波器0具有宽度δƒ与扬声器有关。滤波器的带通(峰值)增益为1。图2A显示了正弦频率ƒ的正弦波。0被应用于输入。扬声器输出是输入的完整幅度,不取决于滤波器δƒ的宽度。
这是因为滤波器仅消除了从ƒ0(没有)。与图2a相比,图2b说明了对随机噪声的戏剧性影响。过滤器可以摆脱频率上方的能量ƒ0+½δƒ和低于ƒ0- ½δƒ,留下一个声音,该信号听起来更接近ƒ0当过滤器δƒ的宽度狭窄时。另外,随着滤波器的狭窄,它会阻止更多的能量,并且输出幅度与√δƒ成比例降低。
频谱分析仪基本上与一系列的带通滤波器相同,类似于图2中所示的过滤器,但是在扬声器的位置,分析仪测量了滤波器输出的幅度(S),并以图形形式显示数值结果。
可以证明,Hz中过滤器的宽度δƒ约为1/T,其中T表示分析仪的测量持续时间,并以秒为单位进行测量。在FFT分析仪中,“过滤器”δƒ分开,以便对频谱进行全面覆盖。例如,10 s的测量将提供0.1 Hz的频率分辨率(滤波器宽度),从而导致100个数据点在1到10 Hz之间。
图2显示了用于测量振幅光谱的分析仪会看到:每个滤波器在滤波器的中心频率处真正传递任何相干噪声的幅度。输出幅度由分析仪(后测量)绘制。测量时间t改变了滤波器宽度δƒ,这不影响结果(如图2A所示)。
很快就可以明显看出,图2的过滤器会产生随机噪声的毫无意义的结果:随着测量时间t的变化,噪声频谱振幅变化。如果测量时间更长,则观察到噪声较小。因此,随机噪声水平不取决于观察到的时间。
为了纠正此效果,如果分析仪配置为测量振幅光谱密度,则乘以7滤波器输出√t。如t以1/Hz的形式表达,所得图具有伏特(或微米)的单位单位。每当更改测量时间t时,此因子都会纠正滤波器带宽,并显示一致的光谱密度级别。
结论
显然,√t可能是显着但重要的是,幅度密度和幅度彼此不同,而气体密度的空气分子数量也是如此。他们是不可比的。详尽的现场调查必须遵循以下步骤:
1)需要为1-100赫兹配置分析仪8振幅光谱的测量。频谱中的所有尖锐尖峰都需要找到,它们的频率和高度都列为列表。这些将对应于单频噪声源(压缩机,建筑风扇,变压器嗡嗡声等)。峰需要在可能的情况下与特定的噪声源相关联(通过关闭可能的来源,并看到哪些尖峰消失或经历更改)。
2)垂直单元需要更改为√赫兹。许多分析仪将振幅光谱更改为ASD频谱,而无需回忆数据。绘制结果后,观察到结果可以注意到步骤1的尖峰高度已改变。如第1步中测量的(微米或伏特)值在ASD图上很容易标记在ASD图上。靠近尖峰的“背景”噪声底,表示随机噪声源的噪声密度(地震噪声,风噪声,人行走)。获得了单个(注释)图,该图准确地说明了环境中的噪声。
3)如果分析仪可以从ASD计算1/3八度图,则可以获得额外的图。但是,Spike频率的1/3八度“垃圾箱”可以显示为“ Spike Bins”。如果连贯的噪声源在这些频率下的噪声占主导地位,则应观察到这些垃圾箱的步骤1)。如果没有,这些垃圾箱的RMS值可能会不正确。t。
4)任何可能是非平稳的噪声源都应注意。这些来源大多数都是连贯的噪声来源:风扇,压缩机,HVAC系统。由于“最坏情况”的情况通常引起人们的极大兴趣,因此在所有噪声源都存在噪声时需要注意。随机噪声可能会受到当地道路交通或天气(字面意思)的影响。由于它可能会在较长的时间段(小时到几天)上有所不同,因此应考虑可能影响ASD测量的条件。
进行测量的人需要确定存在的噪声源类型并收集合适的数据。有时,即使遵循上述简单步骤,非平稳来源也可能使其复杂化。对现有的混乱振动噪声通过适当的意识,可以通过仔细注意可能的噪声来源来减少特定环境中的问题。
参考
1任何具有10 v/g或更高敏感性的加速度计,例如Wilcoxon 731A或PCB 393B12/31。
2也有伪随机噪声源,例如周期源,该源被随机打开和关闭。这些超出了本文的范围。
3风和沿海波是地震噪声的主要因素。
可以将4个分析仪配置为将传感器的输出(以伏特为单位)转换为“工程单元”(如microns或'g)。功率谱也可以用于测量噪声,但是这些单位的[伏特或单位]单位2/赫兹。
5八度频率为2倍。八度的1/3为1.23。
6 a“正交总和”是正方形总和的平方根。
7其他校正因子由于数据的窗口(Hanning,Brickman,Flat Top等)而适用。对窗口的讨论超出了本文的背景。参见Hewlett Packard应用程序注释243:“信号分析的基本原理”。
8个常见传感器(脚注1)在测量低于1 Hz的噪声时较差,而高于100 Hz的噪声通常是原始的,而不是地震。

此信息已从TMC提供的材料中采购,审查和调整。欧洲杯足球竞彩
有关此消息来源的更多信息,请访问TMC。