uEye LE AF板级相机是IDS公司的一系列自动对焦工业相机之一,具有创新的基于对比度的自动对焦新形式。这种新特性大大扩展了入侵检测系统的应用范围。
该技术的自动对焦功能利用了这些型号相机的主动液体镜头控制功能,该功能可以在单次拍摄模式下触发或作为连续对焦控制时使用。
自动对焦控制可以单独配置,以满足应用程序的需要,在几乎所有情况下提供完美聚焦的图像。
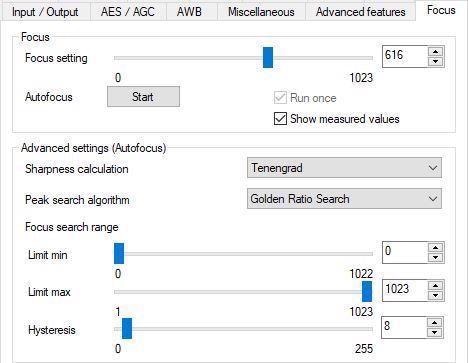
聚焦对话窗口在uEye座舱。图片来源:IDS Imaging Development Systems GmbH
自动集中控制
的4.93版id软件套件uEye LE AF板级相机增加了自动、基于软件的对焦控制功能。
这种额外的控制补充了现有的手动液体镜头控制,为相机开辟了一系列新的使用案例,特别是在工作与可变物体距离的应用。

图片来源:IDS Imaging Development Systems GmbH
现在可以调整感兴趣区域的大小和位置,同时有一系列的图像清晰度测量算法可用,每个算法提供各种配置选项。
这些强大的功能有助于提供快速、可靠的确定所需聚焦范围内的最大图像清晰度,无论应用程序或使用环境。
IDS 4.93软件套件手册提供信息的自动对焦功能的使用uEye LE USB 3.1 Gen 1房颤。可用配置选项的范围uEye驾驶舱焦点对话框中也可以使用在用户的单独的应用程序通过uEye API函数is_Focus()。
手册提供了关于此功能的全面信息,详细介绍了完整的接口参数范围和一系列源代码示例。
自动对焦功能
自动对焦功能通过自动调整相机镜头到适当的物体距离来确保清晰的图像。自动对焦系统利用uEye LE AF板级相机的液体镜头控制来实现对不同距离的对焦。
在单次拍摄模式下,软件会触发自动对焦,一旦测量窗口的最大锐度被确定,自动对焦就会失效。
连续操作模式是在持续的基础上测量图像清晰度,在整个过程中需要时不断地调整镜头。
自动对焦功能是闭环工作,通过在上位机上进行图像数据分析来管理相机的液体镜头。
通过闭环控制确定最大锐度
在使用闭环自动对焦时,液体镜头和像素路径设置(例如对比度和边框)将直接影响图像内容。这将反过来影响图像的清晰度测量结果。
这一评估将通知任何液体透镜调整之前,获取以下图像。
使用这种基于图像的方法不可能立即计算出最佳焦距值,因此需要多次通过闭环控制环路——包括图像采集、测量和焦距调整步骤。
分析通过焦点值确定的值对和计算的图像清晰度,以告知最佳(最大)图像清晰度在适当的焦点场。
确定图像清晰度
测量图像清晰度的方法有很多,但每一种方法都基于两个基本原则。
这些原则中的第一个被称为“边缘锐度”。执行搜索以寻找图像内容中相邻像素之间的大灰度值跳转。
这个过程允许边缘或轮廓被突出显示,这些对比提供了有用的信息在图像清晰度。更清晰的图像边缘意味着原始图像的清晰度更高。
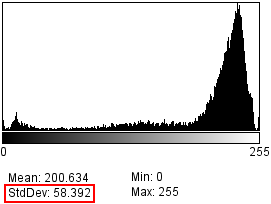
灰色值扩散大。图片来源:IDS Imaging Development Systems GmbH
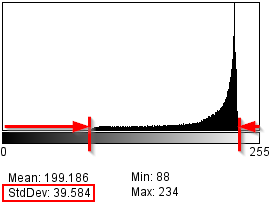
低灰度值扩散。图片来源:IDS Imaging Development Systems GmbH
第二个原则是基于对图像的直方图值的分析。标准差计算可以为图像中像素值在平均灰度值附近的变化提供一种测量工具。
标准差越大,图像存在的灰度值边缘和对比度就越高。未聚焦的图像可能包括较大的灰度值跳跃(边缘),以坡道的形式呈现渐变。
这种变化会导致图像对比度的降低——一个更清晰的图像本质上会表现出更高的灰度扩散,从而产生更高的对比度。
然而,在实践中,物体表面很少是理想的光学焦点测量,通常导致不稳定和不可靠的测量结果。的uEye软件自动对焦功能提供了许多针对特定图像情况的测量方法,以帮助解决这个问题。
Tenengrad、Mean Score等算法利用边缘清晰度原理,方便图像数据分析。这些算法将一个像素一个像素地分析捕获的图像,评估直接相邻像素之间的关系。
与Tenengrad算法相比,Mean Score算法使用了更基本的像素计算和更小的邻域,从而更快地进行分析,但也增加了对噪声的敏感性。
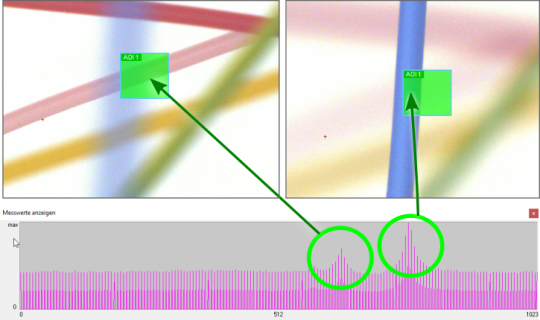
直方图偏差算法利用感兴趣区域(ROI)的直方图值来确定图像的清晰度——这种整体方法为该算法提供了过滤能力。噪声对结果的影响很小,在测量值窗口的锐度限制显示为清晰的曲线。
在搜索的焦点区域中存在大量的近焦点极大值会导致问题,但是,因为直方图偏差不能清楚地区分这些特征。在这些情况下,算法将平滑极大值到一个覆盖曲线,很像一个低通。
使用Mean Score和Tenengrad分析较小的像素邻域,对灰度值变化的影响更明显,提高了边缘的可见性。这两种算法都显示出明显的可微的个体极大值,但它们仍然受到噪声和其他干扰的显著影响。
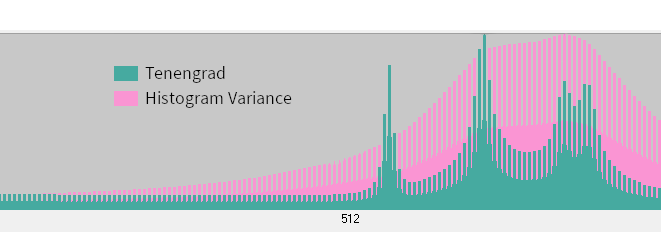
图片来源:IDS Imaging Development Systems GmbH
自动对焦眼睛相机
由于它们使用不同的计算原理,这里概述的三种算法中的每一种都需要不同的时间来计算图像清晰度。
使用复杂的像素变换,如Sobel和拉普拉斯滤波器,涉及的计算负荷比从一个平均灰度值进行的基本标准差计算要高。
还应该注意的是,对更大的感兴趣区域的分析将迅速降低获取的相机帧率。通过选择使用合适的算法,有可能影响测量的速度和精度,尽管这取决于所涉及的应用程序和场景的要求。
Mean Score和Histogram Deviation算法更适合于只有平均PC硬件可用的时间关键计算,但Tenengrad计算提供的任何效率改进通常都是以在更大的测量窗口时可实现的帧率为代价的。
选择一个兴趣区域和焦点范围
通过在感兴趣的区域(通常称为“测量窗口”)进行锐度测量,可以提高计算时间。
在更大的测量窗口上完成锐度计算需要更多的主机CPU的计算时间和功率。
如果计算时间(每张图片)太长,设置的帧率也可能受到不利影响。谨慎的做法是选择尽可能小的测量窗口,以确保足够快的帧率。
建议指定测量窗口的大小和位置,确保只标记需要聚焦的图像内容。这应该具有一个焦点平面,因此,一个最大焦点。
峰值搜索算法在指定搜索范围内的多个局部锐度最大值加上终止条件会导致算法在检测到第一个明显最大值时提前终止搜索。
在这些情况下,可以使用几个选项来更精确地指定搜索,以适应所需的焦点级别。
测量窗口和焦距可以包含多个焦距最大值。图片来源:IDS Imaging Development Systems GmbH
限制镜头的焦距
限制镜头的焦点范围包括将焦点测量限制在应用所需的镜头的焦点范围内。
一个小的区域可能是足够的,尽管这取决于镜头的景深和镜头与图像场景之间的距离。由于使用了更少的清晰度计算,该解决方案减少了最大搜索时间。
如果用户不确定在何处设置焦点范围,建议显示测量值窗口,并使用小迟滞对整个焦点范围进行全扫描。
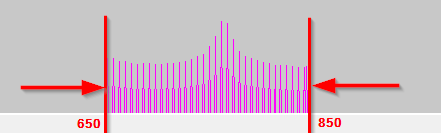
限制镜头的焦距。图片来源:IDS Imaging Development Systems GmbH
改变测量窗口的位置和大小
算法只需要几个清晰的特征就可以确定清晰度;例如,清晰的边缘、小的结构或清晰的灰度值散射。一个较小的测量窗口将允许更快地确定焦点,只有一个图像区域更清楚的焦点。
因此,重要的是使测量窗口尽可能小,同时保持这个窗口尽可能大。在应用程序中对焦对象的图像位置的可重现性越高,就越容易预先设置测量窗口的大小和位置。
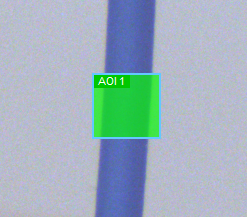
观察测量窗口的大小和位置。图片来源:IDS Imaging Development Systems GmbH
确定最大清晰度
自动对焦功能的开发,以迅速确定焦点设置,提供最佳清晰度值的测量窗口的捕获的图像。
为了实现这一点,uEye软件提供了一系列基本的峰值搜索算法。这些算法适用于不同类型的场景(图像内容),也可以根据用户对速度和质量的要求进行选择。
最慢但最可靠的方法是通过一次获取一张图像来确定其锐度,按顺序设置焦点。
根据不同的搜索策略,选择一些随机样本可以加快搜索最佳锐度值的速度,例如,先跳过焦点设置(间隔),在进一步运行时定位峰值。这些被更仔细地扫描。
这些单独的算法采用许多中止条件来优化搜索时间,但这种方法并不总是产生理想的结果。
uEye软件使用户能够根据自己的需要选择最合适的搜索策略。
由于焦点计算是基于图像内容的,并且需要许多测量来定位最优值,因此在整个搜索过程中图像内容保持不变是很重要的。
搜索算法的特点
黄金分割搜索
黄金比例搜索算法通过黄金比例细分搜索区域来细化最大搜索。这种方法提供了非常快的搜索速度,甚至对于大量的搜索区域。
当使用一个大的搜索范围时,最大锐度可能偶尔会在粗略搜索中被跳过,这个问题可以通过提前缩小搜索范围或只使用这个算法的单峰锐度梯度(具有单一锐度最大值)来解决。
爬山搜索
爬山搜索算法采用大搜索范围和大搜索区间进行粗略搜索。一旦检测到最大值(当锐度值不再增加时),算法将停止下一个焦点区域的搜索,锐度值下降。
然后,该算法将根据定义的最大范围细化测量结果,在后续的搜索运行中继续使用较小的搜索间隔。
此搜索只在滞后被削弱时终止。它比全局搜索更节省时间,但有一个风险,即确定的第一个最大值不是实际的全局最大值。
在粗搜索时,如果采用较宽的搜索范围,可能会跳过最大锐度,因此也可以提前缩小搜索范围或只使用单峰锐度梯度算法。
全球搜索
该算法以较大的搜索间隔和较大的搜索范围开始粗搜索。在整个搜索过程中进行粗搜索,在后续的搜索过程中根据发现的最大范围来细化测量结果。随后的运行也将使用更小的搜索间隔。
全局搜索算法只有在滞后被削弱时才会中止。虽然这种方法比全扫描更快,但当使用大范围搜索时,在粗略搜索时可能会跳过最大清晰度。
通常谨慎的做法是提前缩小搜索范围,或者只使用单峰锐度梯度。这两种方法都有助于解决该算法的局限性。
全扫描
全扫描算法计算整个搜索范围的锐度值在一个单一的通过。这种方法不使用搜索策略;相反,滞后被用来定义测量间隔。
该算法是理想的盲目搜索。该算法能够以较小的迟滞量可靠地定位全局最大锐度,但在小迟滞量和大搜索范围的情况下,该算法的搜索时间较长。
在最坏的情况下,总共将确定1024个焦点值;uEye LE AF对焦设置的最大计数。
有些算法可能会过早地结束搜索,或者过于接近焦点设置完成搜索。如果感兴趣区域的景深不够大,可能无法确定全局最大值。在这种情况下,只有全局搜索或完全扫描才可能成功。
最大的搜索精度
迟滞量决定了最小步长,一旦达到这个步长,对最大锐度的搜索就停止了。这也决定了搜索的最大可达到的精度。
然而,在全扫描中,迟滞定义了在扫描整个搜索区域时使用的固定步长。
常见的对焦相机应用
液体镜头和自动对焦功能允许uEye LE AF系列板级摄像机用于任何涉及可变物体距离的应用。
相机的软件可以手动或自动调整焦距平面,这是一个非常有益的功能,在无法访问镜头本身的情况下。
当应用于移动应用时,如可移动的机器人手臂,一个小的板级摄像机能够聚焦于物体或代码,使这些可以清楚地读取每一个动作。
当与图像处理功能,如HALCON, uEye自动对焦系统提供了极好的潜力。HALCON可用于计算连续清晰的图像,在所有对焦级别上清晰地说明物体场景,不管对焦设置如何,有效地提供与对焦而不是曝光相关的HDR图像(高动态对焦)。
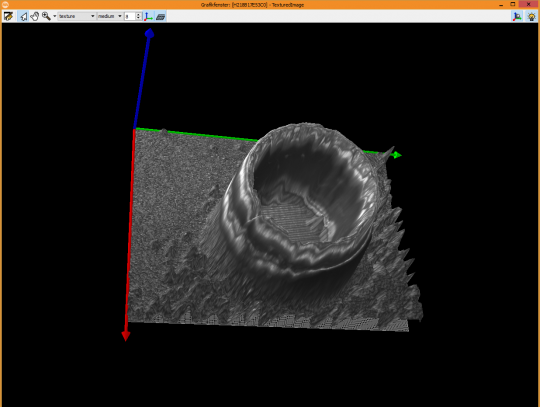
深度信息,由所有聚焦平面的聚焦值计算得到。图片来源:IDS Imaging Development Systems GmbH
HALCON还能够扫描每个焦平面上的物体场景,这意味着它可以根据从这些图像中获得的清晰度测量来计算深度信息(聚焦深度)。
这种强大的功能可以在不使用3D摄像机的情况下确定物体体积,以及确定物体是否位于同一层。
典型的HALCON安装包括一系列现成的对焦图像处理示例,适合直接与uEye LE AF使用。
为了帮助用户利用这项技术的强大功能,IDS Software Suite 4.93手册提供了进一步的代码示例、对焦点功能的全面描述以及对其完整的接口参数范围的详细说明。

这些信息来源于IDS成像开发系统公司提供的资料。欧洲杯足球竞彩
有关此来源的更多信息,请访问IDS成像开发系统有限公司。