与Ozgun科里奇Afsar AZoM说话,k皇家理工学院的博士生,并在麻省理工学院媒体实验室研究分支。Ozgun目前正在开发,OmniFiber。的上下文Ozgun目前研究OmniFiber允许代际互动的潜力在歌剧,如在时间和空间两位专家唱二重唱。
你能给我们的读者一个概述的发展过程OmniFiber吗?
我们有一个多步骤的制造工艺。在初始阶段,我们努力工作主要是商用产品和材料。欧洲杯足球竞彩纤维的一般构造包括弹性材料和组合柔性传感器和一个tubular-braided,联锁网状层。欧洲杯足球竞彩
分层技术,我们最初有一个流体通道工作流体介质流经的地方,这可能是压缩空气或液体。在我们的例子中,压缩空气在大多数应用程序中使用。
弹性层是一个管状弹性体,这存在于几个直径。我们想使小型化结构作为复合纤维可能使用传统的纺织机械生产针织或编织多功能纺织品。纤维进入针织机,需要特定的表面性质以及一定的弹性和灵活性,为了有一个无缝的制造过程。
考虑到我们都曾与商用油管和挤压管材在我们的前提,最小的弹性管,迄今为止,我们使用一个外直径600微米。我们最近购买了挤压头,将允许我们去更小。
弹性管的顶部,我们设计了一个方法来喷电阻传感器层坚持弹性层。所以唯一的材料,正确坚持一个弹性衬底是另一个弹性体。你不能适用,例如,聚合物衬底或导电层上的弹性体,除非你经历很多表面处理有很强的依从性。
在我们的例子中,坚持充气纤维是高产的关键。因此,我们设计的方法做一个低粘度使用弹性体导电溶液,一种硅胶,导电纳米粒子和混合直到他们成为sprayable才能治愈。欧洲杯猜球平台
应用传感器层微管后,我们使用了一个现成的管状编织聚酯或尼龙制成的细丝。这些不到半毫米的直径,这是好的,因为你想要其规模略低于弹性管的直径。
喂养的油管在交错网格需要大量的体力劳动,我们正在建立一个桌面micro-braiding机器。这个计划一旦油管是挤压和治愈,我们将编织层和可定制的参数直接包装。这种方式,我们可以整个复合结构通过一个自动化的制造过程。
下一步是手动添加气动配件,因为你必须有良好的密封两端的传感器和执行器正常工作。我们深入讨论这一过程纸。我们设计了一个表面处理和组合的配件和连接软管状基质为了达到可靠的密封。
这是一个多步单纤维的制造工艺。我们正在建设的自动化加工设备,我们的目标是有无限长度的机械纤维虽然我们可能不会使用的整个链机器人与机器人功能纤维在做一件t恤。不过,我们希望能够连续生产的制造规模工业机器,您可能需要在线轴公里的纤维。在这个阶段,我们取得了70米,但与我们的自动化制造技术,我们希望这将显著增加。
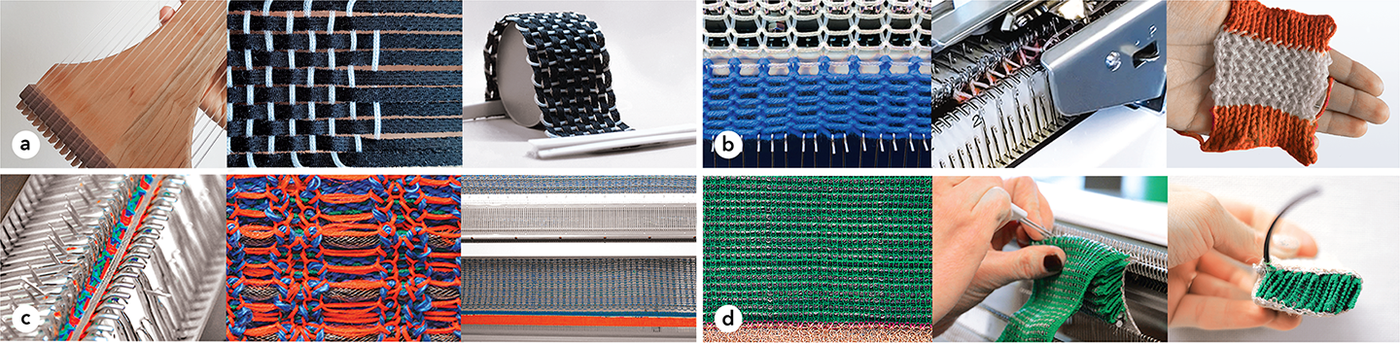
OmniFiber-based色板与各种纤维结构技术:(a) (b)普通针织和编织罗纹针织(c) Inlay-knitted纬编针织quasi-spacer织物(d)与活跃OmniFiber间隔层。图片来源:Ozgun科里奇Afsar
的一些关键特性是什么OmniFiber吗?
OmniFiber是一种人造肌肉纤维。我们是建立在先前的研究在人造肌肉以及气动驱动软机器人。OmniFiber气动驱动,而不是使用一个热驱动或电气驱动。当然,我们的电路电,但只有控制打开和关闭开关控制每个纤维在不同的喷嘴。否则,与我们合作的主要媒介,是压缩空气。
我们试过其他媒体,如液体金属,纤维可以添加另一个功能。我们也有兴趣从事超临界流体,因为当你有长链的纤维,一定阻力建立将会要求更高的工作压力。开动连续纤维很容易,你需要至少在油管表面电阻尽可能的核心。我们相信使用超临界流体将帮助我们减少阻力,提高流速作为回报。
我们想使用气动因为气动的支柱产业。,原因是他们有一个高force-to-weight比率。
我感兴趣与触觉和触摸的交互和视觉的变形功能的纤维。我想创造一些,我们可以在我们的身体感觉,为此,你需要一定的力量范围。例如,假设我想模拟一个公司拥抱在网真交互环境中,像消息发送一个拥抱。觉得拥抱过一件毛衣、t恤或夹克,200牛顿需要生成一个坚定的拥抱。为此,我们发现大部分的现有人造肌肉相当不足迫使他们提供或在响应速度太慢,我们知道气动优于同行。
此外,热驱动纤维或电诱导热驱动,你必须不断地提供电力系统保持一个动作状态。如果我们考虑拥抱的例子,说我想拥抱你10秒,如果我使用热驱动机制,我们需要不断向电路提供电力。而在气动系统中,它只是一种保持阀门处于关闭状态。只要你有良好的密封界面,您可以保留驱动状态没有提供任何额外的权力。
我们也与即时反馈工作感兴趣。我想发送立即触觉信息,然而实现,热致动器有很长的路要走,因为热驱动,或驱动基于大的温度变化,本质上是一个缓慢的过程。还有另一种纤维机制,我们正在研究作为一种新型的人工肌肉,一个thermoresponsive,仍然需要几十秒能够实现驱动的中风和力量,我们能够实现与OmniFiber毫秒。
机器人纤维可以使breath-monitoring衣服
你能给我们的读者一个洞察的作用流体通道中使用多层纤维?
流体通道是一个简单的管状通道内一个弹性衬底。目前,我们使用一个单通道,但挤压自己的套管将使我们能够有多个核心和几何图形运行不同功能流体通过他们,这又是另一个线程,我们追求在这工作。
例如,其中的一个频道可以用于运行一个导电材料利用光纤作为传感器。第二个频道可以使用压缩空气介质,这也使得它成为一个执行机构。通过这种方式,您将有相同的属性,我们在OmniFiber,但一切都封装在通道内的管状构造,而不是让传感器应用到表面痕迹。思考未来,封装所有层的弹性管可以帮助我们用可洗性,例如。
我们安全的传感器通道与另一个30微米厚弹性层;然而,我们还没有完成可洗性测试。这是一个非常重要的属性,如果你想商业化纤维有一天,我们希望。
流体通道的一部分包含了压缩空气。它扩展时压缩空气的体积比油管可以,这就是我们的纤维与机制。你扩大内部通道压缩空气,直到不能再扩大在径向部分,而在径向部分扩大,联锁层外的油管部队合同的长度。这类似于人类的肌肉是如何工作的。
什么福利OmniFiber相比现有的人工肌肉纤维吗?
OmniFiber完全皮肤安全。热致动器,你烧皮肤不适的风险如果你有故障或如果有过热沿着热驱动纤维在一个特定的位置。我们没有这样的风险,除非我们使用极端的压力,这是数以百计的酒吧,我们可能永远不会需要。因此,我感觉舒服的说我们的纤维完全皮肤安全。
这一事实knittable和表面属性允许它进入一个工业针织机是一个优势,例如,更像形状记忆合金金属同行。
此外,我们不需要培训我们的驱动器有一个双向可逆性功能,然而,或扭曲,盘绕高分子形状记忆合金执行器,你需要计划纤维通过艰苦的训练过程。
的好处是什么OmniFiber歌手和演员可以提供吗?
这是非常接近的家。本研究的中心视力和激情是与人体密切合作和运动。歌手和演员都是神奇的合作,因为他们是专家在控制他们的身体和体细胞意识。
我已经使用一年多的专业训练有素的歌剧歌手。我的妈妈也是一位女高音歌唱家,我发现这个从我的童年。我一直惊讶于他们如何控制他们的工具,他们的身体。
我想了解的生理呼吸在歌唱,特别在这项工作中,因为它是一个无形的和无形的过程。我们可以试着在喉部区域看到发生了什么,我们可以试着观察发生了什么呼吸的肌肉,但不是所有从外面看得清清楚楚。
与专家密切合作帮助我更好地理解这一生理想自己。我们已经做了很多的车体制造特定的声音和我的喉咙是如何工作的不同。这个过程的一部分是意识到这些肌肉的呼吸和我如何控制声音的节奏和声音,我了解我自己的身体。
我们的愿望是帮助听众更好地理解歌唱生理学。至于帮助歌手,这是另一条路,我想在我的研究。使用专家帮我观察到他们已经惊人的在他们所做的事情。
它是有趣的发现他们的创作过程和得到的他们已经建立了多年的隐性知识。机器人技术和机器人衣物可以帮助他们成为更有创造性或做其他的事情,他们不能与他们的身体没有这种技术。
我相信我们会把一块技术的唯一原因的身体已经了不起的演员或歌手,如果允许他们做一些更有创造性或不同的改变他们的做法,这是一个目标。
我还会和一群舞蹈演员工作。我会观察我们的设备可以作为触觉中介之间的编排和编排的舞蹈演员身体传达的编排的舞蹈演员。这是后来的研究之一,可能会发生一年后。
我一般感兴趣的领域是教育背景,所以学习创造性运动唱歌或跳舞练习,对于新手学习者学会如何控制自己的呼吸或肌肉的紧张局势。例如,在唱歌,事情更微妙的不仅仅是呼吸呼吸低或高。我打算翻译一些隐喻语言教师在声乐教学中使用到语言通过机器人身体的衣物。
我的亲密的合作者,有,通常运行这个示例“呼吸到你回来了。”这可能不太理解早期过程中学习如何做一个特定类型的呼吸。如何刺激特定机器人可穿戴kinesthetically你身体的一部分,所以它会引导你去做运动?在教育学背景,收购一个特定运动技能或一个特定的运动技能的迁移从专家到实习是我们感兴趣的。

呼吸的上半身衣服指导在唱歌,peristaltically由FlowIO控制。图片来源:Ozgun科里奇Afsar
是什么部分所涉及的测试程序的开发过程中吗OmniFiber吗?
我们有一个深入的讨论涉及到传感器的特性在我们的论文,包括应变它允许多少和我们可以记录多少身体变形。我们还讨论了执行机构的机械特性,力和应变输出的单纤维在不同的长度和厚度。
然后我们开始研究纺织机制和如何制造纺织机械斯沃琪——每一个有不同的功能,我们如何将它们应用到服装创造多通道触觉反馈;压缩或皮肤伸展、振动或推动力量。在纤维、织物和服装的规模,所有这些程序进行测试和详细的制作和实现部分。
以何种方式可以OmniFiber被用来帮助运动员监视性能?
我认为这是很有趣的运动或重量训练的上下文中。在他的周围有一些讨论如何控制你的呼吸在举重时,例如,当你跑步或优化的呼吸模式。甚至如果你不是一个运动员,例如,如果你冥想,呼吸的另一个模式可以帮助你获得一种冥想的状态。
我们走近服装的设计,目的是内衣,从模块化的可穿戴的方法。例如,在某些类型的活动,需要不同类型的呼吸。模块化允许删除的部分服装和能够使用所需的部分刺激呼吸肌肉群的呼吸类型的选择。此外,您可以计划和重新编程某种类型的呼吸模式到服装,以特定的方式引导你。
今年早些时候,加州大学洛杉矶分校进行了研究与歌剧歌手和帖子长COVID病人,在视频通话进行呼吸练习。这将是一个绝佳的机会让我们添加一个触觉交互模式的沟通。
在医疗环境中,OmniFiber的潜在用途是什么?
无论呼吸是至关重要的,我能看到我们的技术是有用的,但它肯定不是局限于呼吸指导。最近,许多个人与特定的运动障碍或亲戚的人需要一个康复设备已经达到。第一个人造肌肉的目的和功能是帮助那些与运动能力损伤有关。当你的自然的肌肉不正常工作,他们可以帮助执行机动任务。
例如,我们做了一个手套,可以帮助你有一个坚实的把握杯或帮助你学习钢琴。在进入创造性领域之前,我一定能看到我们的技术可以受益的人在他们的日常生活。
它也可以应用于人做很多体力劳动,累了一天结束的时候,例如,这可能帮助他们完成任务与机器人系统的支持,没有太多的精力和员工从自己的肌肉,帮助他们从长远来看。
我们的技术可以用来监视和通信之间的医生和门诊恢复一定的运动障碍。病人可以远程交流他们的动作,他们的医生或理疗医师,而不必去医院。

钢琴技能手套(1)可连接的/可拆卸纤维设备,在纤维(2)缝制设备。图片来源:Ozgun科里奇Afsar
你的预言是什么‘机器人’纺织品的未来?
我确实看到变形纺织品或变形纺织品与传感和驱动组件,这是简单的传感器,进入社会。
作为研究者和发明家,我们有大量的责任伦理的技术,非常接近我们的身体。我的部分研究非常关注身体的政治和道德的可穿戴技术。这些机器人之前我们必须考虑这些纤维和织物变得丰富和我们日常穿的一部分。
有一个研究小组麻省理工学院的前沿先进的纤维,尤尔芬克教授的带领下,在计算纤维和织物。他们嵌入纤维内部的处理系统,实际上,意味着我们可以有机械传感器像我们都实现,但也是一个系统,可以处理和存储这些信息在纺织,无需任何外部存储器或微处理器。
我认为机器人纺织品将是非常有益的监控我们的日常活动,每天的变化在我们的身体非常可见机身的变化以及变化的事情,否则我们不会观察。
如果我们的衣服可以了解我们的身体和适应他们从长远来看,这将有助于我们日常穿的可持续性和可能会改变整个时尚产业。不过,在那之前还有很长的路要走的如何回收这样的复合结构的嵌入式电线。这将是一个非常不同的未来在许多方面,但我很兴奋的一小部分。
OmniFiber而言,有管道的发展吗?
一个绝对缩放制造,我们还有很长的路要去使制造过程完全自动化。同时,我们将在不同的上下文中工作:在体育科学背景下工业和学术合作者为具体案例场景构建完成设计除了我们当前呼吸调节的应用程序。欧洲杯线上买球
作为制造过程的一部分,我们正在调查更多的小型设备,使用不同的功能液体传感以及拥有控制联锁机制我们可以嵌入不同的驱动方式在一个链的纤维。
显然成为一个强烈的需求,是计算设计工具支持的机制构建和模拟这些。例如,如果有一个纺织或fashion-tech设计师正在与我们的材料,他们想看看事情会表现在他们实现他们的设计。所以,设计和仿真工具是绝对必要的行为时纤维制成纺织品不是那么直观。
最后,为我的博士研究项目的一部分,我们正在调查能量收获从人类运动提供高压微流体驱动系统。我们正在寻找足够小坦克,压缩空气作为能源来激活你的可穿戴设备大部分是由你和你的日常运动。
读者在哪里可以找到更多的信息?
项目:https://www.media.mit.edu/projects/omnifiber-millifluidic-muscle-fibers/overview/
简介:https://www.media.mit.edu/people/ozgun/overview/
Linkedin:https://www.linkedin.com/in/ozgun科里奇- afsar - 47456 a37/
关于Ozgun科里奇Afsar
 Ozgun科里奇Afsar是k皇家理工学院的博士生,和一个附属麻省理工学院媒体实验室的研究。她完成她的硕士学位在伦敦皇家艺术学院。目前主要研究领域传感器集成软机器人纤维和纺织品,对应于人类生物力学的灵巧。
Ozgun科里奇Afsar是k皇家理工学院的博士生,和一个附属麻省理工学院媒体实验室的研究。她完成她的硕士学位在伦敦皇家艺术学院。目前主要研究领域传感器集成软机器人纤维和纺织品,对应于人类生物力学的灵巧。
这种活跃的纺织系统功能多通道触觉反馈kinesthetically支持创造性运动实践技能收购和转让。她的工作最近作为封面故事麻省理工学院的新闻。她目前正在一个机器人内衣和研究其潜在的上下文中允许代际互动歌剧,如在时间和空间两位专家唱二重唱。她的目标是生成一个实实在在的技能数据库维护体细胞通过软机器人触觉符号形式的材料。欧洲杯足球竞彩
免责声明:这里的观点的受访者的观点,不一定代表AZoM.com (T / A) AZoNetwork有限,这个网站的所有者和经营者。这个声明的一部分条款和条件本网站的使用。