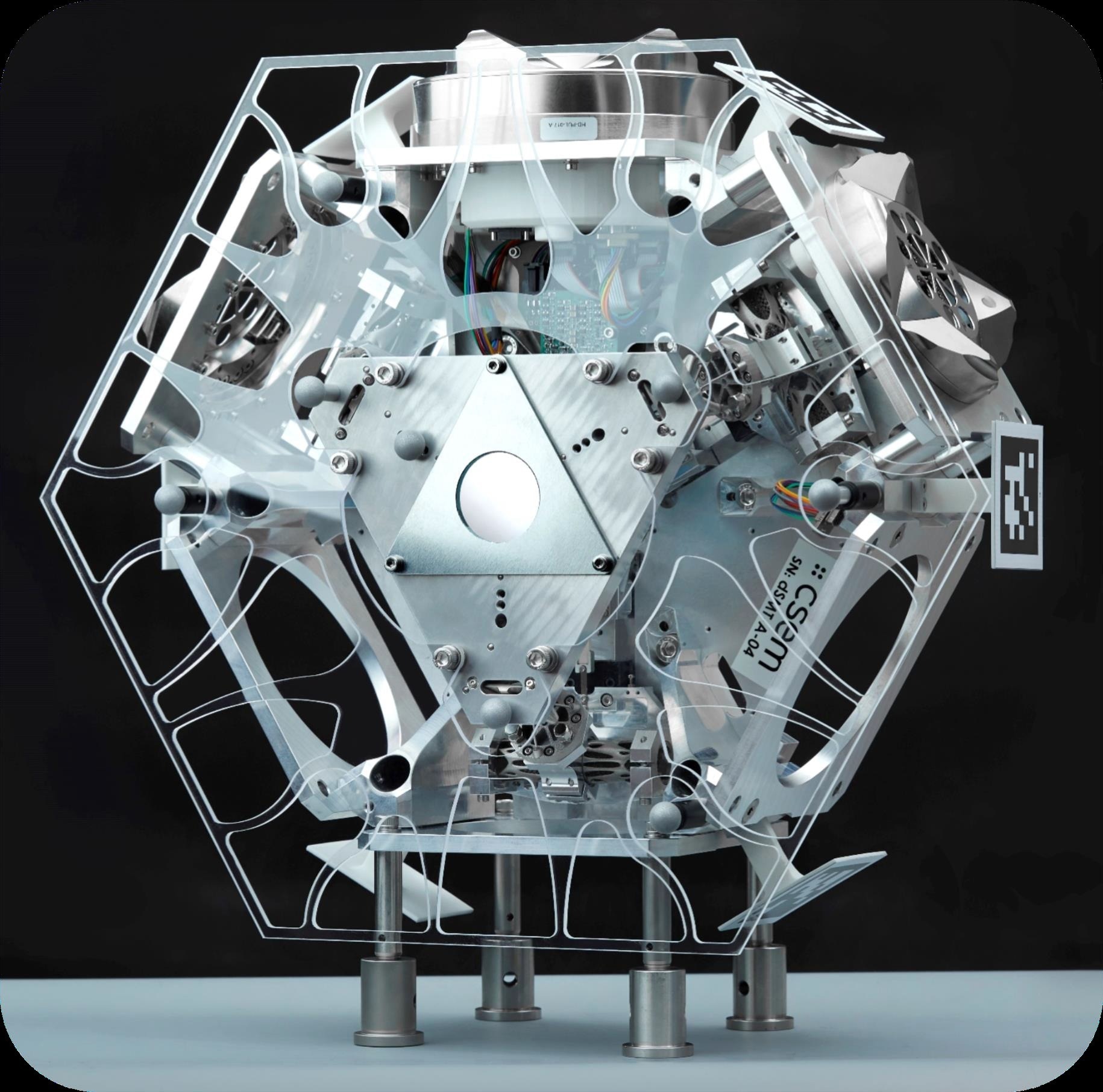
CSEM产生了单镜面瓷砖示威者(SMT)作为脉冲星H2020项目的一部分,其中包括一个定位机制,可以修改六角镜子的位置来弥补缺陷造成的在轨机器人组装。
镜子的位置由这种机制与控制三个自由度(活塞翻译和提示和倾斜旋转)。CSEM兼容的机制和丰富的经验加法制造应用到的领域科学仪器为空间应用,辅助模块的设计。
图片来源:CSEM
主要规格和设计元素
表1。来源:CSEM
| 规范 |
价值 |
| 自由度 |
3:活塞、提示和倾斜 |
| 活塞行程 |
±3毫米 |
| 活塞的决议 |
1µm |
| 活塞可重复性 |
< 5µm |
| 角行程 |
°±1 |
| 角分辨率 |
4µrad |
| 角可重复性 |
< 20µrad |
| 砖的形状 |
六角 |
| 大规模的预算 |
< 9公斤 |
| 维 |
<宽度400毫米 |
瓷砖运动架构
对于每一个三脚架的腿,有一个兼容的结构:
-
一个径向直线导轨
-
与单轴挠曲主
-
一曲与three-rotation轴万向节
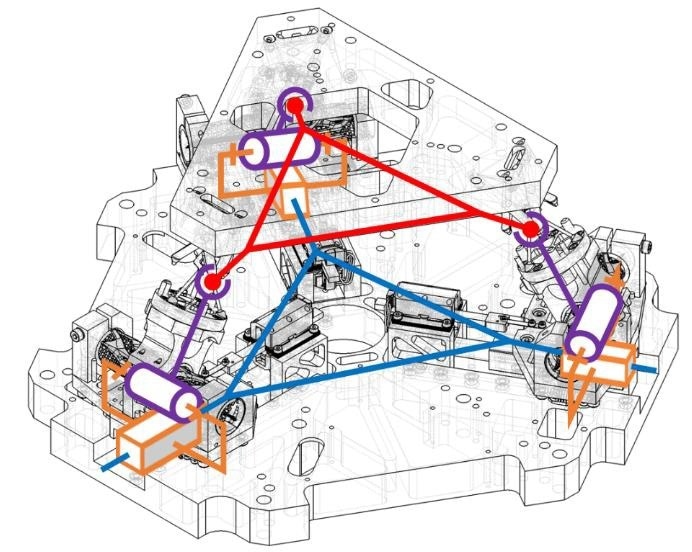
图片来源:CSEM
线性电动舞台
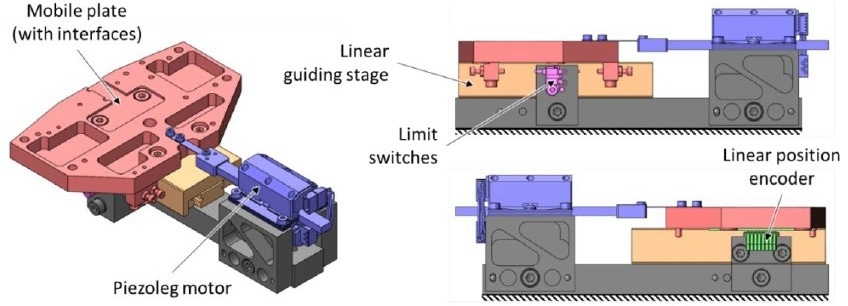
图片来源:CSEM
灵活的传输阶段
图片来源:CSEM
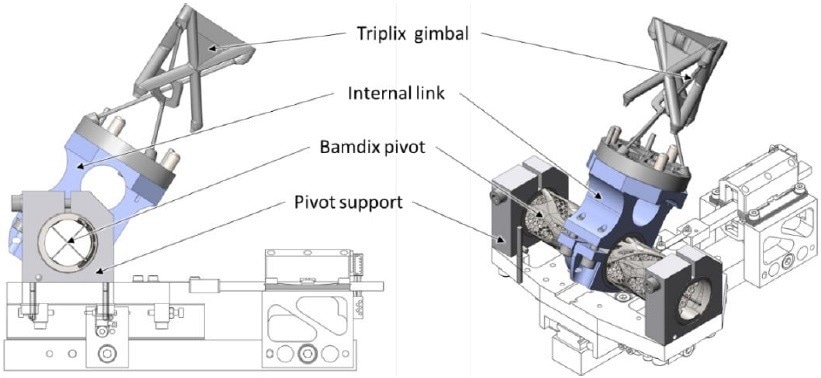
灵活的轴心和平衡环(通过SLM加法制造设计和内部生产)
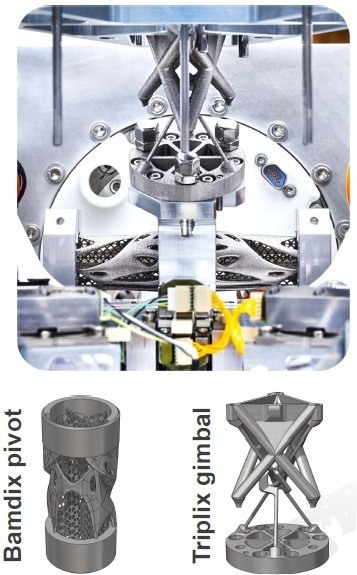
图片来源:CSEM
校准和性能
标定的线性阶段
图片来源:CSEM
-
瓷砖分辨率大于所需的4µrad提示和倾斜和1µm活塞由于分辨率比350海里
-
的精度±1.5µm范围
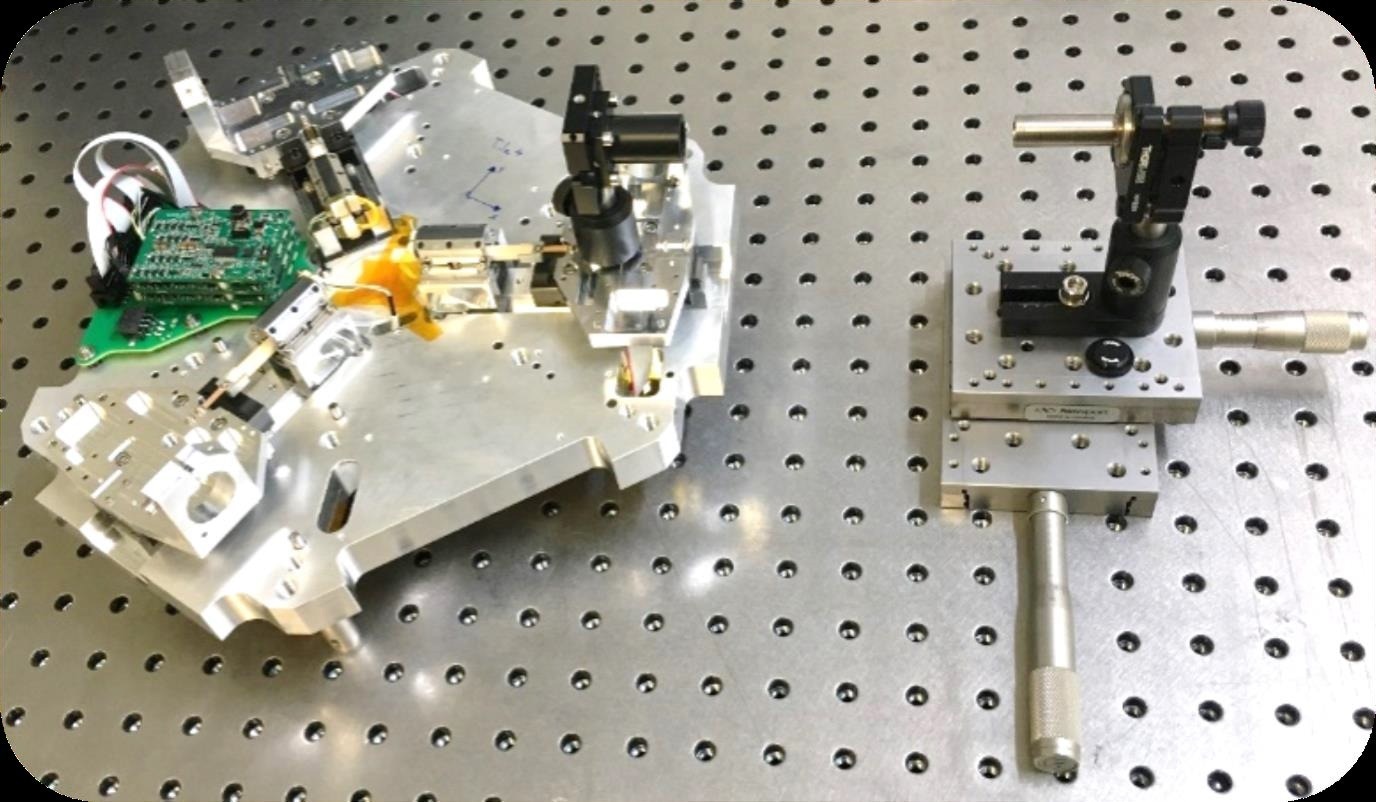
瓷砖校准设置
-
测量活塞的位置和提示和倾斜角度,自准直望远镜和一个包含三个正面面对三个反光镜的干涉仪。
瓷砖校准过程
-
使用有限元建模,确定初步的几何模型(IGM)
-
计算坐标多镜使用初步IGM姿势
-
实际过程的建模IGM利用逐步回归方法来确定一个多项式模型
图片来源:CSEM
性能验证
-
瓷砖的几何模型是计算使用8000测量位置
-
两个瓷砖组装、校准和确认
-
之间的差异所需的镜像位置和测量位置计算出512个职位瓷砖的整体空间位置
表2。来源:CSEM
| 性能 |
Tile1 |
Tile2 |
| 错误 |
提示(µrad) |
倾斜(µrad) |
活塞(µm) |
提示(µrad) |
倾斜(µrad) |
活塞(µm) |
| 的意思是 |
36.13 |
-46.65 |
-2.12 |
9.96 |
-25.53 |
0.78 |
| Std.偏差 |
88.02 |
86.84 |
5.44 |
98.97 |
100.35 |
6.18 |
| 最大(abs) |
286.87 |
268.96 |
16.25 |
362.19 |
305.79 |
19.06 |
-
在整个中风的机制,两块整体镜定位精度约100µrad提示和倾斜旋转和7µm活塞翻译。
可重复性测量
-
可重复性值计算到64年实现镜像位置为瓦瓦1和91镜像位置2,每十倍。这些地方获得的序列是随机,以确保不会有偏见。
表3。来源:CSEM
| 可重复性 |
瓷砖1 |
瓷砖2 |
| 提示 |
5.98±1.54µrad |
8.01±3.89µrad |
| 倾斜 |
3.69±1.25µrad |
3.67±1.15µrad |
| 活塞 |
0.61±0.23µm |
0.33±0.16µm |
-
机制的角度可重复性小于10µrad提示倾斜和小于1µm活塞,大大低于项目的需求。

这些信息已经采购,审核并改编自CSEM提供的材料。欧洲杯足球竞彩
在这个来源的更多信息,请访问CSEM。