评估摩擦系数,摩擦力和扭矩等任意材料对的摩擦学特性,精度很高对于多个研究和工业领域至关重要。实验室实验和测试是对摩擦学特性进行定量评估的唯一可行方法。
尽管有许多可用的摩擦植物选项,从商业摩擦仪到自发开发系统,获得准确且可重复的摩擦学财产测量仍然是一个挑战。这是由于材料,表面,环境和用于进行测量的设备的相互依赖性。2020欧洲杯下注官网
Bruker的UMT Tribolab™通过新的6D Force-Torque传感器利用了传感器技术中最具创新性的开发。该最先进的传感器可以同时测量六个张量的组件(分别为x,y和z轴中的三个力和三个扭矩)。
六轴负载传感器促进了高测量灵敏度和各向同性,同时保留了广泛的力范围内测量轴之间的低干扰(在正常方向上最多1160牛顿,最大扭矩为20牛顿米)。
这些额外变量的同步测量以及横向力中的方差,有助于对所评估的动力学有更深入的了解。本文概述了Tribolab 6D力扭转传感器的特定特征和测量优势。
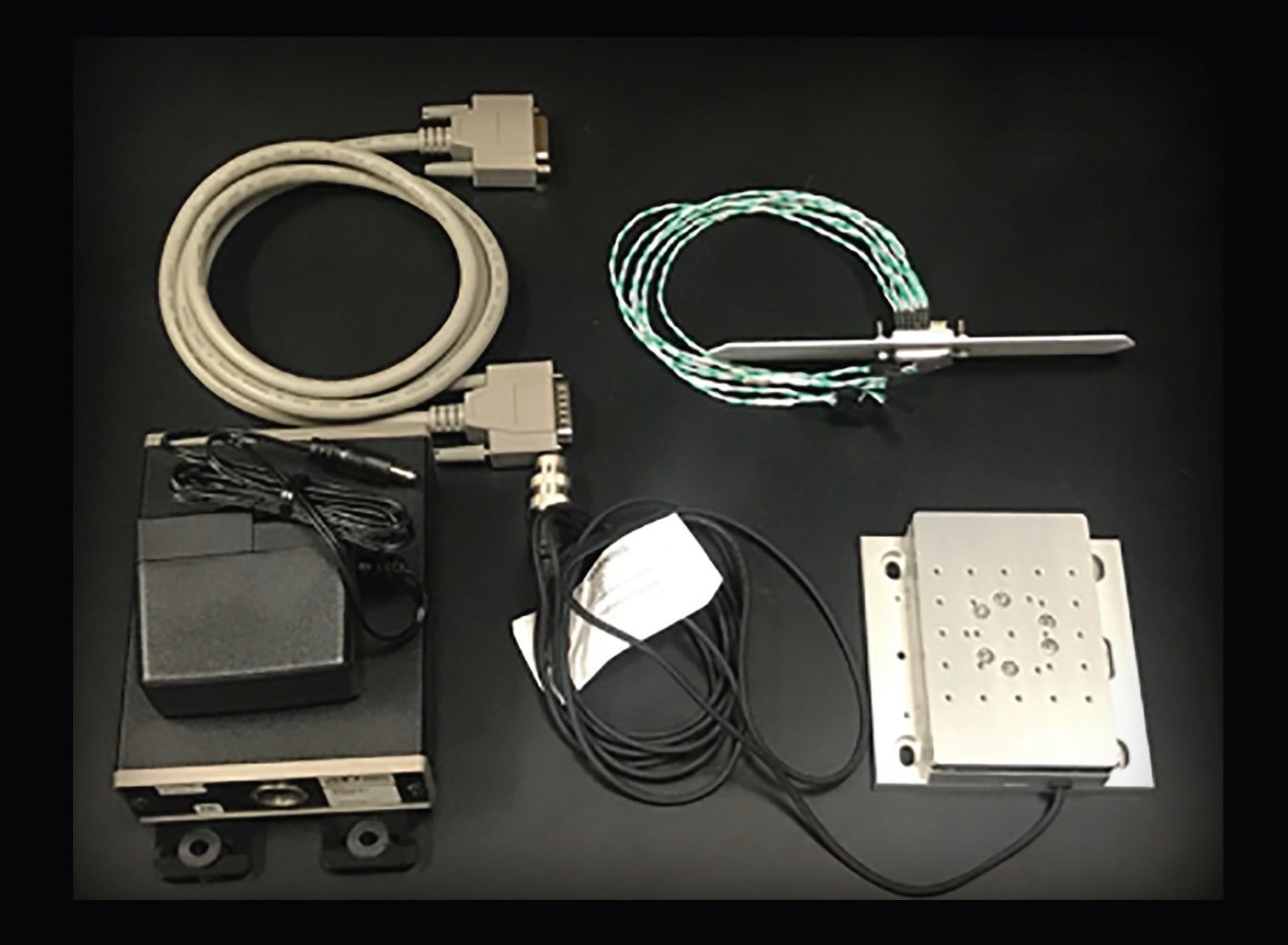
图1。UMT Tribolab 6D力量刺激载荷池。图片来源:Bruker Nano表面
高性能传感器设计
The force-torque sensor’s architecture is founded on the principle of mechanical deformation of the structure using silicon strain gauges. The strain gauges are positioned on a compliant structure that generates six channels of strain gauge voltage output. These devices are digitized and transformed into forces and torques via matrix calculations.
传感元素在发辐射的高应力区域上的方便位置使在辐条表面上几乎恒定应变分布。恒定应变分布弥补了应变表定位误差引起的负面影响,从而提高了传感器在评估标准六力和扭矩组件(FX,FY,FY,FZ,TX,TY,TY,TZ)方面的准确性。
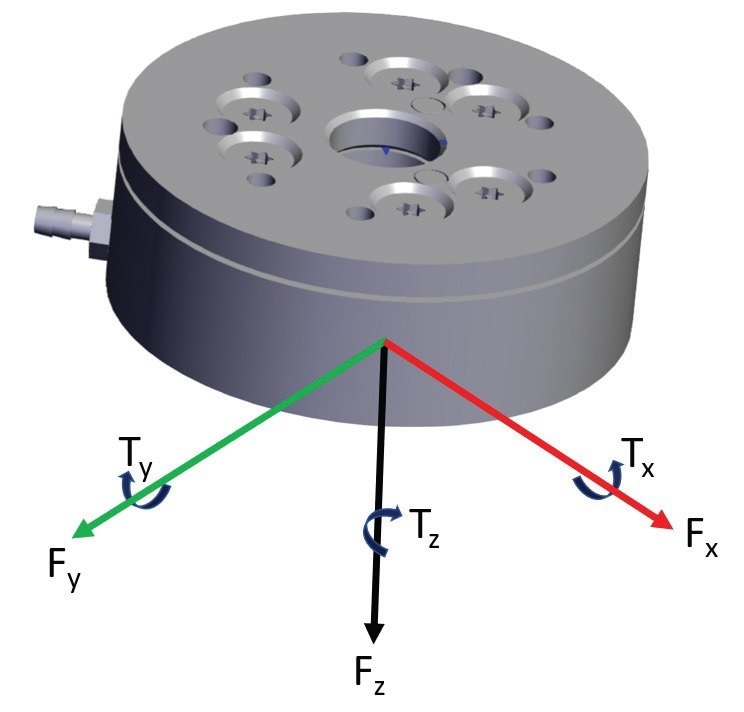
图2。力扭力传感器的结构及其位置指示器。图片来源:Bruker Nano表面
最宽的测量福利
多个测量的集成负载传感器
6D力扭转传感器的独特设计结合了应变量表传感器,以在各种力量和扭矩上提供最佳的同时旋转测量。
The practicality of delivering simultaneous measurements of forces and torques in the x, y and z axes is exceptionally useful for calculating macroscopic friction coefficients to track the distribution of friction forces along an interface. It also helps to assess external torques of the interface that are vital for local stress evaluations.
6D力扭转传感器可针对不同类型的应用提供三个规格(请参见表1)。
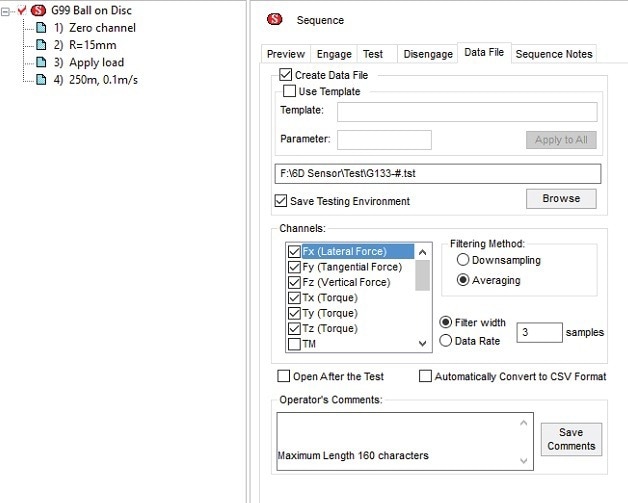
图3。力扭力传感器的结构及其位置指示器。图片来源:Bruker Nano表面
Table 1.Technical specifications of UMT TriboLab 6D Force-Torque Sensors. Source: Bruker Nano Surfaces
| 模型/规格 |
6d-low |
6D-MID |
6天 |
| 摩擦/横向力(FX,FY) |
| Range |
0 - 145 N |
0 - 290 N |
0 - 580 N |
| Resolution |
62。5mN |
125 mn |
0.25 n |
| Load (Fz) |
| Range |
0 - 290 N |
0 - 580 N |
0 – 1160 N |
| Resolution |
62。5mN |
125 mn |
0.25 n |
| 扭矩(TX,TY) |
| Range |
5Nm |
10 nm |
10 nm |
| Resolution |
1 nm |
2。6Nm |
5.3 nm |
| 扭矩(TZ) |
| Range |
5Nm |
10 nm |
10 nm |
| Resolution |
0.06 nm |
1.3 nm |
2。6Nm |
卓越的准确性和灵敏度
当试图减少摩擦和扭矩系数测量的任何不确定性时,原始输出信号的优质质量是关键。最近的一项研究报告说,在将力传感器尽可能靠近接触表面时,测量精度提高了。1
Tribolab和6D力扭力传感器的构型协同在接触表面上产生的力,限制了传感器所经历的扭矩,并显着降低了测量不确定性。表2显示,在6D力扭转传感器上测量的平均全尺度误差低于2%。
Table 2.在环境条件下测试的6D-高,6D中心和6D高力升压电池的精度测量(95%置信度,全尺度负荷的百分比)。资料来源:布鲁克纳米表面
| 模型/规格 |
fx |
FY |
fz |
TX |
泰 |
TZ |
| 6d-low |
1。25% |
1.00% |
0.75% |
1。25% |
1.50% |
1。25% |
| 6d中等 |
1.00% |
0.75% |
0.75% |
1.00% |
1。25% |
1。25% |
| 6天 |
1.75% |
1。25% |
1.00% |
1。25% |
1.75% |
1.00% |
表2中显示的测量值指示每个轴的全尺度负载的百分比定义的最大误差量。除了可以忽略不计的精度不确定性测量外,6D力扭转传感器在长时间内表现出良好的稳定性(请参见图4中的稳定垂直负载)和温度控制的实验(见图5)。这种质量对于校准传感器的靶向准确数据至关重要。
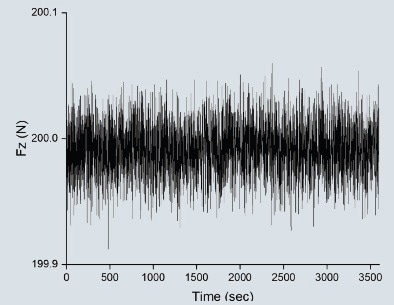
Figure 4.将200 N的力施加到钢样本1小时。6D力扭转传感器的记录噪声水平小于全尺度值的0.05%。图片来源:Bruker Nano表面
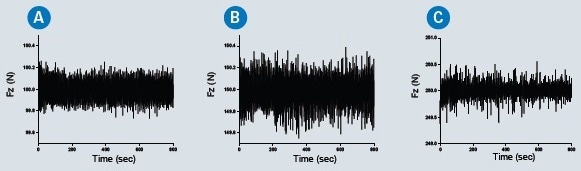
Figure 5.6D力扭转传感器分别在200°C下分别具有(a)100 n,(b)150 n和(c)250 N的施加力,经历最小的热漂移效应。图片来源:Bruker Nano表面
用高精度测量消除伪影
典型(FZ)和切向(FX,FY)力的动力学摩擦比及其扭矩(TX,TY和TZ)限制对于摩擦学应用中的基本研究至关重要。
然而,当分别组装力和扭矩传感器以运行这些测量时,鼓励各种信号通道之间的串扰并侵犯摩擦学数据的准确性时,就会出现错位问题。
Bruker的6D力扭转传感器凭借其单细胞设计限制了小于1.5%的串扰,为研究人员提供了每个摩擦学实验的相关和精确数据(见图6)。此外,UMT软件使用户在测试时可以补偿和抵消噪声偏差。
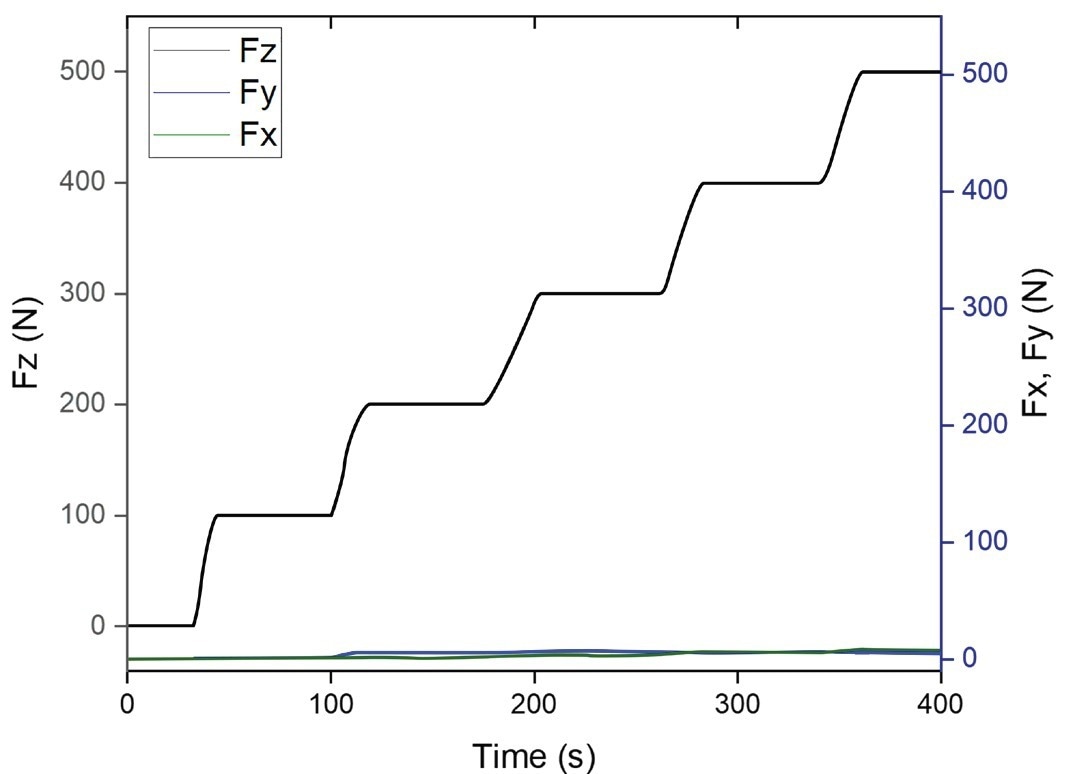
Figure 6.正常载荷FZ和横向力传感FX/FY之间的最小串扰。图片来源:Bruker Nano表面
产品兼容性与占地面积减少
The 6D Force-Torque Sensor is fully compatible with the current UMT TriboLab configuration, allowing seamless integration into existing experiences. The sensor is a plug-and-play peripheral that can be used in combination with the fast exchange kit (AM30C413), fast exchange plate (M30C784), and 2-inch or 4-inch extension blocks (M30C366-1, M30C366-2).
可以将各种上层标本与此配置一起使用,以满足广泛的测试条件和应用。
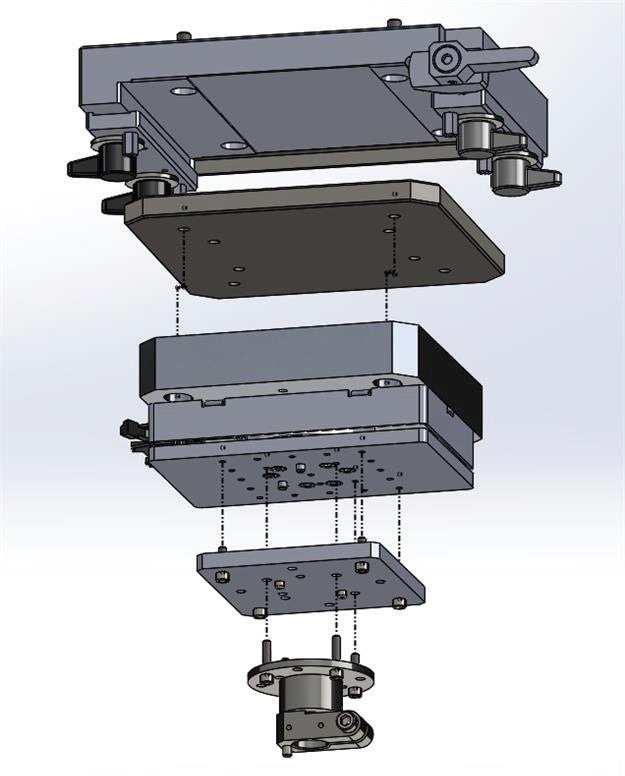
Figure 7.6D力扭转传感器的组装图。图片来源:Bruker Nano表面
实验应用
布鲁克(Bruker)的UMT Tribolab是一个创新的模块化平台,该平台内置在系统的底座中,可促进广泛的速度和扭矩测试。
结合高级6D力量刺激传感器,Tribolab在多个轴周围提供了复杂的运动和高度精确的测量,这是摩擦学研究和工业应用的基本要求。
旋转测试
The rotary test is a frequently used friction and wear testing method in the laboratory and across industrial sectors. During this test, a ball or pin is placed under the 6D Force-Torque Sensor, and a standard disk is incorporated as the lower specimen (see Figure 8a/b).
在这里,测量了几个轴上的力和扭矩以获取摩擦系数和扭矩系数。
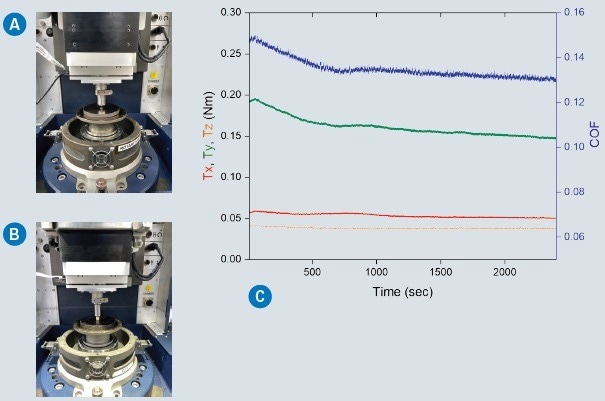
图8。带有6D力扭转传感器的UMT Tribolab旋转测试模块;(a)圆盘上的球,(b)固定盘测试,以及(c)动态摩擦系数和扭矩相抵触时间的图。图片来源:Bruker Nano表面
跨多个轴的测量对于更好地理解Tribosystem的摩擦和磨损行为非常有用。摩擦测量的原位系数考虑了FX和FY的贡献,由数学方程式COF =√表示(FX)2+ FY2)/ fx。
在整个高速旋转tribotests中,由于组装松动或断裂事件而导致的接触伙伴的不必要运动会对测试产生不利影响。6D Force-Torque传感器允许用户通过实时监视沿X和Y轴的扭矩输出来轻松识别此类问题(请参见图8C),以便可以立即解决任何故障。
制动和离合器材料筛选欧洲杯足球竞彩
The Brake and Clutch Material Screening Tester for UMT TriboLab has been purposely designed as a cost-effective and rapid way to screen and rank materials before moving on to evaluations at a component level.
这种方法使小摩擦材料样品的摩擦学性能精确,方便。在监视重要参数(例如摩擦,滑动速度,温度和磨损)时出现。
缩放降低的方法通常用于复制车辆制动系统,同时始终匹配Dentermemeters为SAE J2522等协议所采用的关键物理参数。
The 6D Force-Torque Sensor aids the screening testing process by enabling simultaneous multiple axes measurements to better comprehend the dynamic tribosystem’s behavior.
图9a在Tribolab上显示标准设置,用于使用内置的6D力扭转传感器进行制动材料筛选。传感器提供的新输出功能之一,如图9b所示,扭矩输出(TX,TY和TZ)。它可以更好地评估制动材料的热恶化的制动器机制。
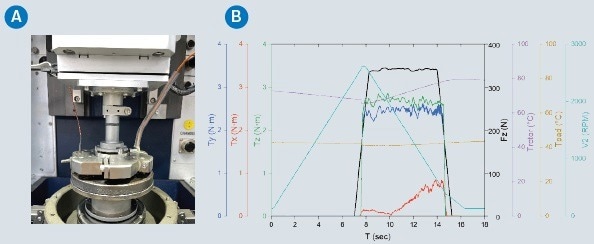
图9。(a)带有6D力扭转传感器的UMT Tribolab制动材料筛选测试仪,(b)通过在8秒内将速度从2620到100到100至5 km/h的速度变化,并在8秒内改变速度(b)仿真施加的力为354 N(2 MPa接触压力)。图片来源:Bruker Nano表面
在表3中,显示了具有六个组件的力和扭矩,包括四球测试,扭曲压缩测试和滑动比测试。
表3。The advantages of using a 6D Force-Torque Sensor to perform ASTM standard tests. Source: Bruker Nano Surfaces
| ASTM# |
描述 |
优点 |
| D4172-20 & D2266-01 |
磨损润滑液和油脂的预防特性(四球法) |
Multidirectional torque output signals enable quick identification of balls rolling and slipping in the four-ball cup holder. |
| D5183-21 |
Determination of the Coefficient of Friction of Lubricants (Four-Ball Method) |
| D2596-20&D2783-19 |
测量润滑流体和油脂的极端压力特性(四球法) |
| G99-17 |
戴上针杆式设备的测试 |
具有最小热漂移影响的施加力的稳定性适用于延长期测试。 |
| G132-96(2018) |
引脚磨损测试 |
| D3702-94(2019) |
磨损速率和材料摩擦系数在自润滑的摩擦接触中使用推力洗衣机测试机欧洲杯足球竞彩 |
Sensitivity of the load sensor improves self-leveling of the upper sample in a thrust washer test. |
| D5619-00和D8288-19 |
比较金属去除液 |
可以轻松地识别和防止敲击过程中的跨线程。 |
Summary
Bruker’s UMT TriboLab is an indispensable tribometer for force-torque measurements across an extensive range of forces and torques in research and industry, including precision for scientific instruments, actuators, automotive, robotics sensors, micro-manipulators, and lubrication applications.
With the latest 6D Force-Torque Sensor, TriboLab offers:
- 高精度测量值可以在多个方向上解决测量轴之间的干扰。
- 线性响应具有高固有频率和过载保护。
- Solutions to independent simultaneous force and torque measurements.
最终,Tribolab能够进行广泛的摩擦,磨损和润滑测试,符合各种国际公认的标准,例如ASTM,ISO,DIN,SAE等。
References
- Grégoire,C.,Laulagnet,B.,Perret-Liaudet,J.,Durand,T.,Collet,M。和Scheibert,J。,仪器滑块的设计和表征,旨在测量干燥粗糙固体之间的局部微型影响力。传感器和执行器A:物理,317,112478,(2021)。
- Ballo,F.,Gobbi,M.,Mastinu,G。和Previati,G。,通过创新的六轴负载电池进行了实力和力矩测量。实验力学,54(4),571-592,(2014)。
- Heglund,N.C。,用于测量地面反应力的力板的简单设计。J. Exp。Biol。,93,(1981)。
- SAE J2522,测功机全球制动效率,SAE International(2013)。
- ASTM G09-05 (Reapproved 2010), Standard Test Method for Wear Testing with a Pin-onDisk Apparatus, ASTM International, West Conshohocken, PA, (2010).