由苏黎世的仪器2023年7月26日艾梅Molineux看过的
自我调节系统与反馈回路,即。,路由系统的输出输入,存在自古以来,已经成为现代科学技术不可分割的一部分。
在150多年前,第一个试图彻底描述使用反馈控制回路发生在詹姆斯克拉克麦克斯韦的文章,州长。1
在控制策略中,一个开环控制系统是指一个控制器的行动是根据预先确定的输入值不考虑反馈决定。
然而,一个闭环控制器利用连续反馈,便于实时修改提高稳定性,精度和鲁棒性。这意味着它更适合在变化的条件下实现预期的控制目标。
目前,最受欢迎的类型的闭环控制系统Proportional-Integral-Derivative控制器(PID)。这些控制器不断测量和修改系统的输出来满足所需的定位点,即。,一个给定的目标条件的过程或系统考虑。
PID控制器系统的先验知识或模型的需求多种多样,相对成本效益,简单的实现。这使得他们的利用率可能在各种各样的系统中,包括液压和气动以及模拟和数字电子产品。
结果,他们在各个行业得到了广泛应用和研究应用,如光子、制造、材料科学、传感器和纳米技术。欧洲杯线上买球
PID控制回路被广泛运用于日常生活和工业自动化的许多方面,包括陀螺仪self-navigating汽车和智能手机,流量控制器在管道、烤箱用于烹饪食物或样品,和日常车辆交通的管理。
他们使用更先进的研究领域也值得注意,比如稳定的激光腔和光学和光学干涉仪,闭环控制的微机电系统(MEMS)陀螺仪,和描述机械谐振器在扫描探针显微镜(SPM)。
本文讨论了PID控制回路的主要功能和原则,提出了优化和设计策略和他们如何可以实现在一个直接的方法使用锁定放大器由苏黎世提供工具。
工作原理和构建块
一个PID控制器的目标是产生一个控制信号,可以动态地减少输出之间的差异和一个给定的系统所需的定位点。
考虑的计划显示在图1。作为一个初始步骤,系统的输出y (t)循环,对选点测量r (t)的比较器。这个生产时间误差信号e (t) = r (t) - y (t)。
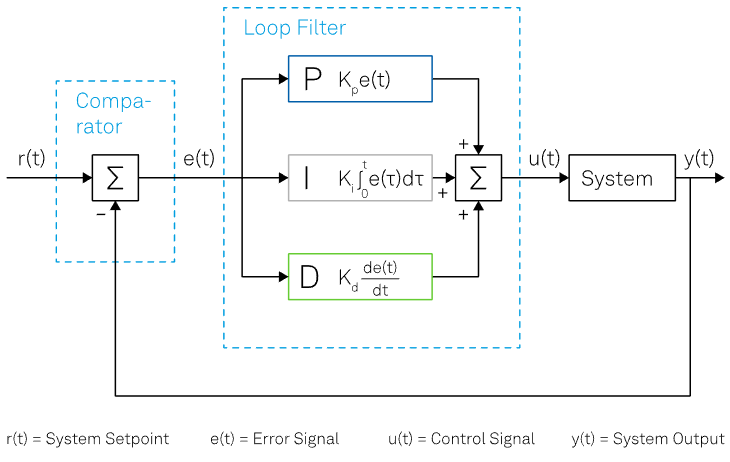
图1所示。的示意图表示一般PID控制回路在其最一般的形式。图片来源:苏黎世仪器
这后,误差信号由循环过滤,随后利用最小化产生控制信号u (t)驱动的输出系统,启动闭环操作。
反复执行这些步骤来减少错误。因此,除了考虑当前的错误,随着时间的推移积累的考虑(由积分)及其未来趋势(由导数在时间t)也有关。这是显示在图2。
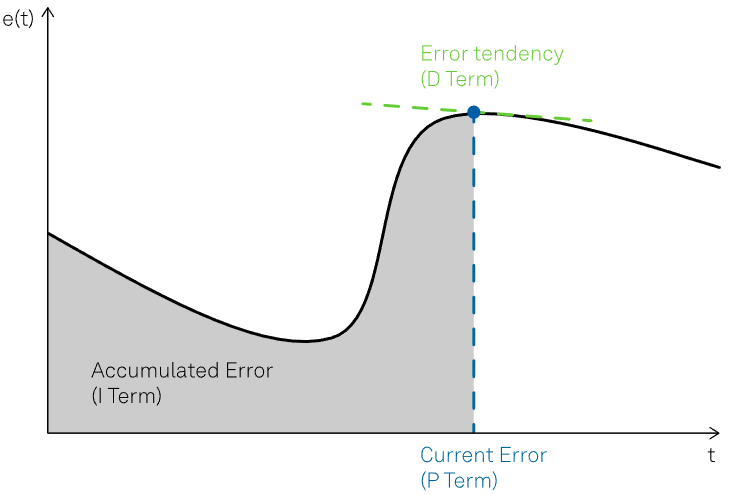
图2。误差函数的例子突出贡献的P,我和D条款。图片来源:苏黎世仪器
误差的最小化是最一般情况下完成通过使用以下三个主要组成部分PID控制器回路滤波器:比例、积分和微分项。
在其最一般的形式,完全控制函数可以写数学三个个人贡献的总和,如下:

KpK我,和Kd增益系数相关比例,积分,分别和导数术语。
比例项
比例项用P和基于当前测量系统的输出之间的误差和定位点。
这一项促进系统的输出被带回选点采用修正错误的振幅成正比。这导致减少上升时间的校正信号,如图3所示。
误差越大,越大校正应用的比例,即。越大,误差固定Kp,你就越大P(t)。
自从P术语总是需要一个非零误差生成它的输出,它不能取消错误本身。在稳态系统的条件下,达到一个平衡,其中包括一个稳态误差。
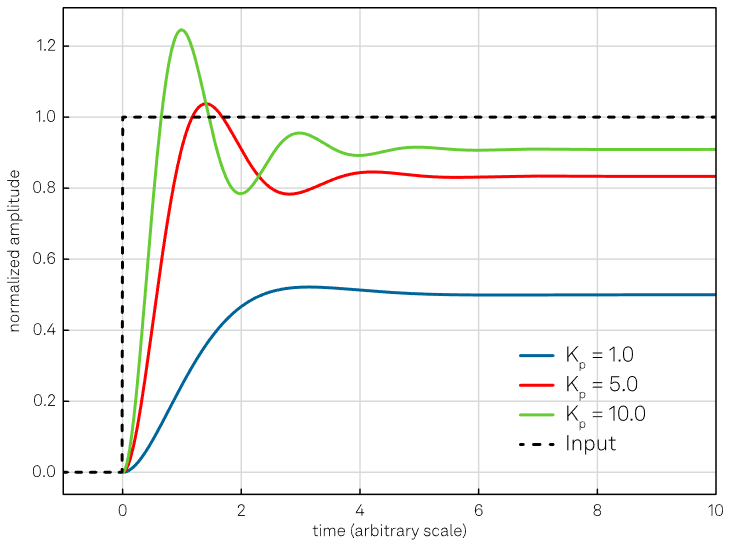
图3。比例作用的效果。增加Kp系数降低了上升时间,但错误从未接近零。此外,过高的价值成比例的增加可能会导致一个振荡输出。图片来源:苏黎世仪器
积分项
积分项是用我并应用一个改正错误的时间积分成正比,即的历史错误。例如,如果错误仍然随着时间的推移,积分项继续增加,导致更大的回调被应用于系统的输出。
与比例项,积分项允许控制器产生一个非零控制信号零点误差条件下。这允许控制器使系统所需的准确定位点。其效果如图4所示。
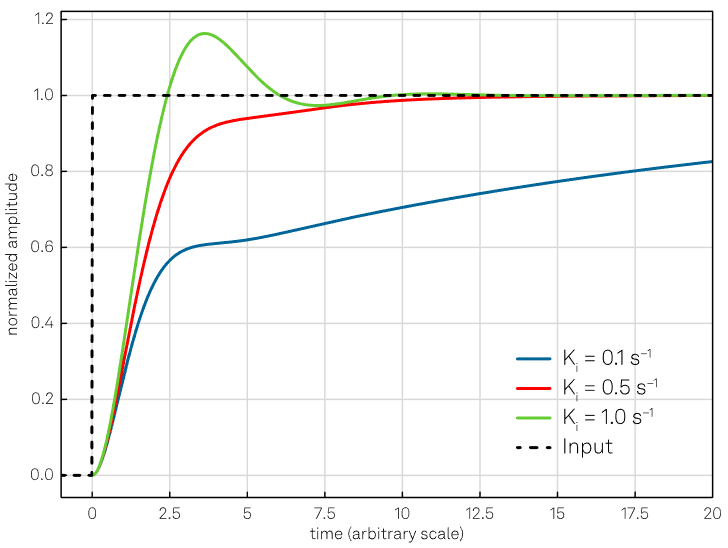
图4。常数K的积分作用的影响p= 1。增加K我,响应也将更快,但导致较大的振荡和超调如果值增加太多(绿色曲线)。图片来源:苏黎世仪器
增加积分增益系数的值会导致增加的贡献随时间积累误差控制信号。这意味着,如果存在稳态误差,积分项有一个很大的增益系数将导致控制信号消除错误的速度比小积分项。
然而,增加积分项过多可能会导致一个振荡输出是否积累过多的错误。这导致振荡的控制信号过度和创建在选点。这种现象有时被称为积分终结。2
导数项
导数项是用D和提供控制错误的倾向,即。,其未来的行为,通过应用的修正错误的时间导数成正比。
这使得误差的变化率下降,这反过来,增强了控制回路的稳定性和响应性。
目标是预测误差信号的变化:如果错误展览一个上升趋势,微分作用试图弥补之前的错误变得显著(比例作用)或持续一段时间(积分作用)。
在实际的实现pid,微分作用可以省略,因为它灵敏度高输入信号的质量。
当参考价值迅速变化时,如在一个非常嘈杂的控制信号的情况下,通常的导数误差非常大。这导致了PID控制器发生突然变化会导致不稳定或振荡的控制回路。
之前来增强稳定性、低通滤波的误差信号通常是用作缓解策略;然而,低通滤波和微分控制中和对方;因此,只有数量有限的过滤是可能的。
如果正确校准和系统足够宽容,“微分作用可以提供控制器的性能有决定性的贡献。图5说明了导数项的影响。
每一项的影响的响应系统在很大程度上依赖于系统的特点。
因此,权重的KpK我和Kd收益可能调整调整控制回路的性能和实现所需的精度和响应性。
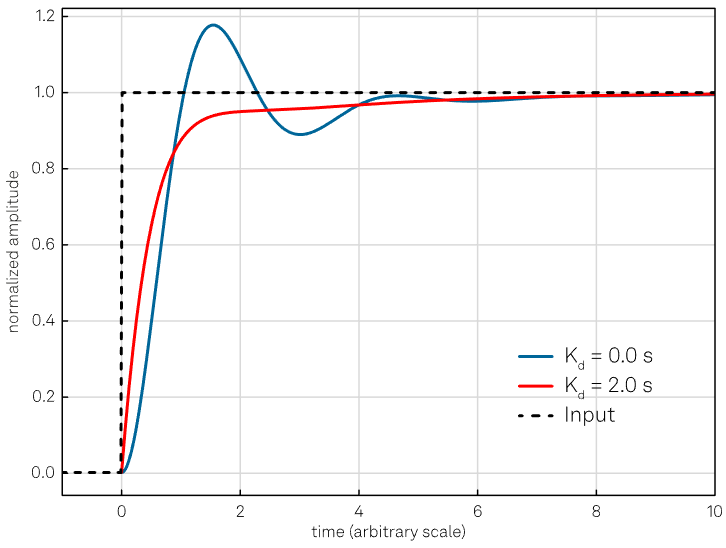
图5。微分作用的目的是提高系统的阻尼;但是,太大的K值d可能会使系统不稳定或振荡,如所描述的文本。获得的曲线保持比例和积分增益常数(Kp= 4 K我= 11)。图片来源:苏黎世仪器
一些应用程序或简单的系统可能不需要所有这三个控制方面提供的PID控制器。操作控制器只有这些术语的一个子集,未使用的术语可以被设置为0,因此导致π,PD, P,或者我控制器。
例如,由于他们的慢动力学,PI控制器常用于应用程序优先消除稳态误差和稳定性在快速响应时间。
这方面的一个例子是,当控制烤箱的温度。在这个场景中,一个PI控制器通常是用来确保精确的温度调节和消除任何稳态补偿,考虑到烤箱的相对缓慢的响应特性。
推导的一组初始的参数(优化)
PID控制器的主要好处之一是,他们可以实现没有任何先验知识或系统的详细模型。
由于启发式校准程序,不得计算系数仅基于简单的实验测试进行了直接在过程。然而,最初的调优PID参数可能仍然是一个微妙的任务。
有多个成熟的技术来获得一组初始的系数,与很多涉及系统的开环参数的测量。
正如前面提到的,开环系统是指没有任何反馈控制,即。,一个输入信号应用于系统,以及由此产生的输出只测量而不是反馈给输入。
输入信号可能是一个阶跃函数,一个正弦波,斜坡,或任何其他类型的信号,适合的系统控制。
随后的输出系统记录作为时间的函数,可以分析建立系统的响应特性,包括其固有频率、时间常数和阻尼比。
一般策略来确定初始参数一般包括以下三个步骤:
- 获得系统的开环反应和衡量的一些特征参数,如系统输出的振荡周期和延迟过程。
- 确定粗的增益系数K值pK我和Kd使用测量参数。
- 优化的PID增益系数优化速度,噪音,和鲁棒性。
一些最受欢迎的方法实现粗调优是Ziegler-Nichols方法,3Cohen-Coon方法,4继电器的方法,5和Tyreus-Luyben法。6
一个实际的例子,一个初始调优过程是表1中列出,由Ziegler-Nichols方法。
表1。最初的逐步过程优化的PID控制器,基于Ziegler-Nichols方法。来源:苏黎世仪器
| 设置P, I, D为零 |
| ↓ |
| 增加比例(P)增益,直到系统开始显示一致和稳定的振荡。这个值被称为最终获得(Ku)。 |
| ↓ |
| 测量的周期振荡(Tu)。 |
| ↓ |
根据所需类型的控制回路(P, PI或PID)将增益设置为以下值:
|
Kp |
K我 |
Kd |
| P控制器 |
0.5 Ku |
0 |
0 |
| 比例积分控制器 |
0.45 Ku |
0.54 Ku/ Tu |
0 |
| PID控制器 |
0.6 Ku |
1.2 Ku/ Tu |
0.075 KuTu |
|
| ↓ |
| 测试系统的响应和调整收益。如果响应太慢或缓慢,增加P或者收益。如果响应速度过快或振荡,降低P或者我收获。如果有过度或振铃,D增益增加。 |
引用
- 麦克斯韦James Clerk 1868。在州长,Proc。r . Soc。lond.16270 - 283
- y田和D.P.阿瑟顿。重置控制系统的分析和设计。电气工程师学会,2004年。
- 齐格勒,j·G。,尼克尔斯:b (1942)。最佳设置自动控制器。ASME的交易,64 (6),759 - 768。
- 科恩,H。&浣熊,g . a (1953)。一个线性算子的闭环伺服系统的分析方法。富兰克林学院学报,256 (6),489 - 512
- Astrom, k . J。& Hagglund, t (1995)。PID控制器:理论、设计和优化(第二版)。美国社会工具。
- Luyben, w . l . (1990)。Plantwide控制:一些实际问题。化学工程进展,86(4),调查。

这些信息已经采购,审核并改编自苏黎世仪器提供的材料。欧洲杯足球竞彩
在这个来源的更多信息,请访问苏黎世的仪器。