S Mart是当前可用的最小的Areal共聚焦传感器,并提供了紧凑的设计和多功能率仪表仪的理想组合。
- FOV(单镜头)> 3.4×2.8毫米
- 收购时间7 S
- 光学分辨率<177 nm
- 系统噪声<1 nm

图片来源:感官计量学
紧凑的多功能性
S Mart提供了基本的测量多功能性,以处理不同的表面类型和地形。
借助Sensofar的3合1技术 - 通过专利的微型播放方法将三种测量技术集成到单个传感器头中 - 可以轻松地将系统切换到最合适的手头任务方法。这是一个小的,经济的和多功能的解决方案。
图片来源:感官计量学
物镜
表格1。资料来源:感官计量学
|
布莱特菲尔德 |
干涉法 |
| 放大 |
2.5倍 |
5倍 |
10倍 |
20倍 |
50x |
100x |
150x |
5倍 |
10倍 |
20倍 |
50x |
100x |
| NA |
0.075 |
0.15 |
0.30 |
0.45 |
0.80 |
0.90 |
0.95 |
0.13 |
0.30 |
0.40 |
0.55 |
0.70 |
| WD(MM) |
6.5 |
23.5 |
17.5 |
4.5 |
1.0 |
1.0 |
0.2 |
9.3 |
7.4 |
4.7 |
3.4 |
2.0 |
| FOV1(µm) |
6800x5675 |
3400x2837 |
1700x1420 |
850x710 |
340x284 |
170x142 |
113x95 |
3400x2837 |
1700x1420 |
850x710 |
340x284 |
170x142 |
| 空间采样2(µm) |
5.52 |
2.76 |
1.38 |
0.69 |
0.28 |
0.14 |
0.09 |
2.76 |
1.38 |
0.69 |
0.28 |
0.14 |
| 光学分辨率3(µm) |
2.23 |
1.11 |
0.55 |
0.37 |
0.21 |
0.18 |
0.17 |
2.76 |
1.38 |
0.69 |
0.30 |
0.24 |
| 系统噪声(NM) |
300 |
75 |
25 |
8 |
3 |
2 |
1 |
1 |
| 最大坡度5(º) |
3 |
8 |
14 |
21 |
42 |
51 |
71 |
3 |
8 |
14 |
21 |
42 |
系统规格
表2。资料来源:感官计量学
| 。 |
。 |
| 测量原理 |
共聚焦,CSI和焦点变化 |
| 测量类型 |
图像,3D,3D厚度,轮廓和坐标 |
| 相机 |
1.2MPX:1232x1028像素(28 fps) |
| 共聚焦帧速率 |
9,5 fps |
| 垂直扫描范围 |
线性阶段:40毫米范围;2 nm分辨率 |
| 最大限度。Z测量范围 |
共聚焦36毫米;CSI 7毫米;焦点变化25毫米 |
| LED光源 |
白色575 nm(默认,寿命40.000 h - 其他可用的选项) |
| 鼻子 |
5位置完全电动 |
| 样品反射率 |
0.05%至100% |
| 高级软件分析 |
Inc:Sensoview;OP:Sensopro,Sensomap |
| 软件通信 |
DLL(C ++或C#,Windows 10®-64位)
XML(任何操作系统) |
| 电脑 |
最新的英特尔处理器 |
| 操作系统 |
Microsoft Windows 10®,64位 |
| 电缆长度 |
10 m |
| 环境 |
温度10ºC至35ºC;湿度<80%RH;高度<2000 m |
12/3英寸相机和0.5倍光学元件的最大视野。2表面上的像素尺寸。3L&S:线和空间,根据雷利标准的衍射极限的一半。空间采样可能会限制干预目标的光学分辨率。白色LED的值。4系统噪声测量为垂直于光轴的校准镜的两个连续测量之间的差异。在VC-E振动环境中获得的值。5在光滑的表面上。在粗糙的表面上最多可达86°。其他目标可用。
方面
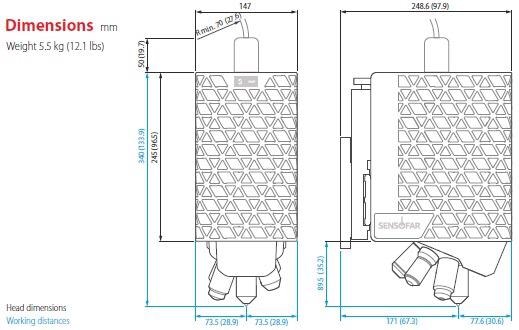
图片来源:感官计量学