2017年3月15日
欧洲杯线上买球我从未参加过,我记得中学较高级科学课学生为鸡蛋下降挑战并肩工作,团队搭建容器,在鸡蛋下降时握住鸡蛋并尽最大可能缓冲它 — — 目标是完成鸡蛋破解与学校相关项目与教程使用三维打印技术, 中学生三维打印蝙蝠屋或学生三维打印假手向e-Nible捐赠格雷森加利斯基项目 加利福尼亚Los Alamitos中学高教 开发3D仿生机假手Galisky项目领先,并如他的博客所证明的,对三维打印学校项目不陌生,利用艺术历史类技术三维打印St并带领童子军队 搭建三角形3D打印机
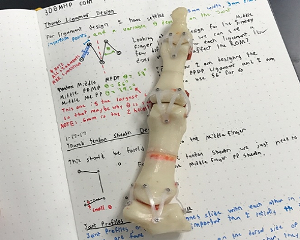 几乎全装拇指缺针层三维打印
几乎全装拇指缺针层三维打印
Galizsky解释自2016年8月以来, 与团队都高中高年级学生在空余时间工作此项目华府研究论文显示 他们的工作基础 和虽然他确实修改了一些设计元素
Emanuel Todorov和Zhe Xu共同撰写论文“高生物模拟人造Limb再生机器人手设计”,我们熟知他们的三维打印和机器人工作
论文抽象状态表示 广博研究领域 从机器人远程操作到组织工程肢体再生设计机器人手的挑战主要来自我们从工程角度有限理解人手和我们复制重要生物机械特征并使用传统机械设计的能力人手生物机理是手机精度的基本构件 并可用高生物模拟设计复制
欧洲杯足球竞彩加利斯基机器人假手由三维打印骨架、圆形剪片、拉链和辅助结构组成,如手掌和servo塔搭建碎片等,所有这些都使用软硬材料开发加利斯基自己设计37 项目573D文件其余20个修改骨文件
STL文件54
- 20块和20块向导
- 16级
- 14块草原
- 6滑轮
- 2servo安装板
- 手掌和手掌通道
欧洲杯足球竞彩Galsky表示,虽然骨架本身使用ABS材料打印3D,但所有其他部件都是用激光割橡皮和Taulman3D的PCTPE编织和蓝t-glase制成的所有斜线都用Spectra深海捕鱼线制作
Galyski对3DPrint.com表示:「我的设计以几种方式对机器人手的现状创新,容我手运动速度使用传统机械接合器, 取人手蓝本, 使用印刷长片和激光割橡胶组成联合胶囊, 并有性能优异性优异性优优优优于传统机器人手。”
Galsky继续解释,因为他机器人假手设计与真人手非常相似, 他能够使用已经存在的数据判定如何控制手, 令手像真人手移动, 而不是写代码:他只是用画线传感器跟踪自己的手动算法总成本, 包括电机等零件在内, 均能保持在600元以下, 与其他生物模拟机器人手相比大有提高grabCAD上提供的所有部件5天内也可以打印3D
i项目实手大于人规模是因为制造方便性, 我的servo电机控制手表因子与我前臂大小相似, 即servo数组模拟部分, Galsky对3DPrint.com说 。多机器人手多大,所以我设计创新 因为它小易控形式因子
目前的项目赞助者有Flastruder、Phillips Steel和Taulman3D,尽管Galsky表示他的团队需要更多有兴趣成为项目赞助者, 通过Galiski博客联系表示项目完成后,他将制作网站 完全面向3D印刷机假手Galyski进项目 Stratisys极端重新设计挑战可查看录入视频了解更多此项目:
Stratis极端自设计录入3D枢纽录入视频-Grayson Galsky
源码 :https://3dprint.com/