由于行业标准4.0,数字化、自动化和网络化的系统和设备在生产中越来越占主导地位的主题,因此在物流。4.0行业追求的不断优化流程和工作流的生产力和灵活性,从而节约时间和成本。机器人系统已成为自动化过程的驱动力。通过物联网(物联网),机器人正变得越来越敏感,自治,移动和容易操作。越来越多的成为一个日常的助手在工厂和仓库。智能成像技术中发挥着越来越重要的作用。
图片来源:id
来满足日益增长的需求扩展和改变生产环境完全自动化和智能网络化生产,公司在巴伐利亚从指甲ONTEC自动化GmbH是一家开发了一个自动驾驶机器人援助系统。“智能机器人助手”使用灵活性和自动化的协同效应:它由一个强大的和有效的intralogistics平台,灵活的机械臂和一个健壮的3 d立体相机系统从Ensenso N系列由IDS成像发展GmbH是一家现代化的、可靠的系统。
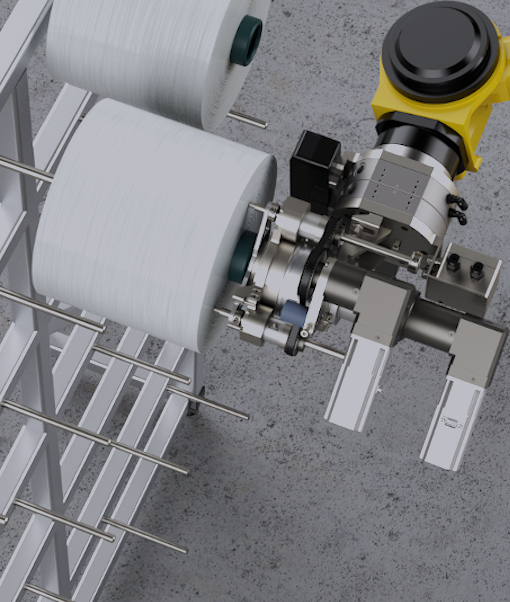
解决方法是通用的,接管单调,重要的设置和布置任务,例如。自治区交通系统适用于最低水准提升的欧洲托盘容器或工业格式以及网格托盘在不同大小的最大负载可达1200公斤。客户在纺织行业,自主移动小车(自动引导车辆)用于线圈筒子架的自动加载。为了这个目的,它与纱线轴,拿起托盘运输到指定的捕虾笼和负载在进一步处理。使用专门开发了夹具系统,每8 - 1000纱包转变拿起来推到芯棒的捕虾笼。分级方案和线圈的位置被一个Ensenso 3 d相机(N45系列)安装在夹具上的手臂。
应用程序
托盘装载工业纱线轴的从地上捡起一个预定义的存储和运输到鱼篮位置的地方。在那里,夹持位置本身垂直托盘上面。图像触发发送到Ensenso 3 d相机从N45系列,引发的内部软件ONTEC SPSComm。
它与车辆的PLC和网络可以读出和传递数据。在应用程序中,SPSComm控制软件之间的通信部分的车辆,钳子和相机。这种方式,相机知道当车辆和掠夺者在拍照。这需要一个图像,通过点云的软件解决方案基于标准HALCON ONTEC软件,该报告的坐标机器人托盘上的线圈。
机器人可以准确地接线圈和进一步处理它们。一旦夹了一层纱线轴,包装材料的Ensenso相机拍出来的照片躺在纱线轴和提供的点云。这些点云处理同样为机器人提供一根针夹删除中间的信息层。“这种方法意味着层数和完成模式定义的托盘不需要提前,甚至可以处理不完整的托盘没有任何问题,”蒂姆Bockel解释道,在ONTEC软件开发人员。“爪不需要转换使用针夹。对于这个应用程序,它有一个正常的组件中间的线圈和一个扣人心弦的针组件层。”
对于这个任务,使用手机对3 d收购移动机械臂和静态对象,Ensenso 3 d相机适用于因其紧凑的设计。Ensenso N 45的3 d立体电子从住房完全解耦,允许使用一个轻量级的塑料复合作为房屋的材料。低体重有利于使用智能机器人等机械手臂的助理。相机还可以应对苛刻的环境条件。“挑战与这个应用程序可以找到主要的不同照明条件下明显不同房间的大厅,在一天的不同时刻,”蒂姆Bockel描述的情况。即使在艰难的照明条件,综合投影仪项目高对比度成像通过纹理到对象模式的面具和一个随机点模式,从而补充毫无特色的同质表面结构。这意味着,集成摄像头完全满足要求。
“通过预先配置在NxView,任务是解决了。”This sample programme with source code demonstrates the main functions of the NxLib library, which can be used to open one or more stereo and color cameras whose image and depth data are visualized. Parameters such as exposure time, binning, AOI and depth measuring range can - as in this case - be adjusted live for the matching method used.
匹配过程赋予Ensenso 3 d相机识别像素非常高,包括他们的位置改变,通过辅助结构投射到表面和创建完成,均匀场景的深度信息。这反过来又确保必要的精度与智能机器人助理收益。其他相机的选择标准等,标准的视觉界面千兆以太网和全球快门1.3像素的传感器。“相机只需要一个图像对整个托盘支持更快的吞吐量,但它提供的坐标与毫米的精度范围相对较大的距离,使机械臂控制精确,”马蒂亚斯•霍夫曼解释说,it专家ONTEC应用程序开发。“我们2/4因此需要高分辨率的相机能够安全地记录的边缘线圈与3 d照相机。”The localization of the edges is important in order to be able to pass on as accurate as possible the position from the center of the spool to the gripper.
此外,相机是专门设计用于在严酷的环境条件。它有一个screwable GPIO触发和flash和连接器是IP65/67防止污垢,灰尘,溅水或清洗剂。
软件
Ensenso SDK允许手眼标定相机的机器人手臂,允许简单的翻译或位移坐标使用机器人位姿。此外,通过使用内部相机设置,一个“FileCam”的现状被记录在每个传递,即在每个图像触发。这可以轻松地调整任何边界情况后,在这个应用程序例如意想不到的照明条件下,图像或障碍也意外定位线圈的形象。Ensenso SDK也允许将相机内部日志文件存储和存档可能的评估。
ONTEC也使用这些“FileCams”自动检查测试用例,从而确保正确的功能的安排进行调整时视觉软件。此外,各种车辆协调和后勤瓶颈最小化的基础上ONTEC特别研发的控制系统。不同的助理可以导航,同时在一个非常狭小的空间里。通过使用工业界面工具ONTEC SPSComm,甚至标准工业机器人可以安全地集成到整个应用程序和不同系统之间的数据交换。
前景
系统的进一步发展计划,除此之外,自主车辆导航的。“关于车辆导航AGV, IDS相机的使用是非常有趣的。我们目前正在评估使用新的Ensenso年代系列反应,使车辆更灵活的障碍,例如,分类他们周围,甚至可能开车,”蒂姆Bockel说,软件开发人员在ONTEC,列出下一个发展步骤。ONTEC的接口配置已经使系统集成到各种行业4.0应用程序,而自主移动机器人的模块化结构解决方案留下余地适应各种各样的任务。通过这种方式,它不仅可以增加生产和物流的效率和灵活性,但在许多地方也确实有助于减轻员工的工作量。
客户端
ONTEC自动化GmbH是一家系统集成和创新的自动化系统供应商,工厂和特殊机器工业生产。业务部门包括技术纺织品的解决方案,自动化解决方案、智能机器人解决方案和电气配电板解决方案。公司有25年经验的专业体现在创新、面向客户的解决方案在整个价值链,包括机器人、工业图像处理软件开发,电气工程和力学。